
お問い合わせの多いご質問をまとめました。以下のリストより製品カテゴリをお選びいただくと、情報のある製品名が表示されます。
質問事項をクリックすると回答が表示されます。
- 交流電源
- 直流電源
- 交流電子負荷
- 直流電子負荷
- 回生型電源(双方向)
- 充放電試験器
- 信号発生器
- オーディオアナライザ
- GNSS信号発生器/記録・再生器
- 安全試験器
- リップルノイズメータ
- 差動プローブ/高周波終端抵抗
- ソフトウェア
- 電源自動検査システム
- ワットチェッカー関連
- 無停電電源装置(UPS)
6900Sシリーズ (8)
6900Sシリーズはシンプルな設計のため、特別なメンテナンスは必要ありませんが、以下の簡単な管理を推奨しています:
定期的に機器内部のホコリやゴミを取り除くこと
使用後は適切な温度・湿度環境で保管すること
必要に応じて動作確認や簡易点検を行うこと
詳しいメンテナンス手順は取扱説明書をご参照ください。
6900Sシリーズの出力仕様はモデルによって異なります。具体的な出力電圧や周波数範囲、最大出力電力などは製品の詳細仕様をご確認ください。製品ページをご覧頂くか、お問い合わせいただければ最適なモデルをご提案いたします。
お気軽にお問い合わせください。044-223-79509:00-18:00 [土日・祝日除く]
お問い合わせいいえ、操作は非常に簡単です!
基本的な設定はスイッチやダイヤル操作で行えるため、複雑な操作手順は必要ありません。製品本体には分かりやすい表示やインターフェースが採用されており、電源機器に不慣れな方でもすぐに使い始めることができます。
高機能な交流電源は、さまざまな付加機能(プログラム制御や特殊な出力モードなど)が搭載されている場合がありますが、6900Sシリーズでは基本性能に特化し、価格を抑えた製品設計となっています。そのため、「高機能が不要なシンプルな用途」向けに最適です。
6900Sシリーズは以下の場面で特にお役立ていただけます:
教育現場や実験室での基本的な電源供給
小規模な試験装置や検査機器向け
中小規模の製造設備での製品動作テスト
個人プロジェクトやスタートアップの開発用途
「必要な機能だけ欲しい」という用途に特化しています。
6900Sシリーズは、「ローコスト」と「シンプルな機能性」が特徴の交流電源です。余計な機能を排除し、必要十分な性能を備えることで、コストパフォーマンス高く利用いただけます。操作が簡単で直感的に使用できるため、設計や開発から現場作業まで幅広い用途で活躍します。
6910の出力端子はN端子もL端子もGNDと絶縁されております。N端子をGNDか、あるいは供試物のGNDに接続して測定して下さい。
交流電源6900Sシリーズにラックマウントキット(Opt.101)はございます。
詳細は製品ページをご覧ください。
6300シリーズ (5)
交流電源6300/6500シリーズにおいて,現在のステータス(正常出力中,アラーム発生中など)をPCで取得する場合は「STATUS?」コマンドを使用します。
「STATUS?」コマンドを使って取得できるコマンドの種類は以下の通りです.
6300/6500シリーズ共通
[設定関連]
Pass
Delay
Dwell
LO-DC
OCP
IGBT
FUSE
HI-DC
LO-DC
AC-LP
OTP
RCP
6500シリーズのみ
HI-A
LO-A
HI-P
LO-P
HI-PF
LO-PF
OVP
LVP
OPP
6300シリーズのみ
R HI-A
S HI-A
T HI-A
R LO-A
S LO-A
T LO-A
R HI-P
S HI-P
T HI-P
R LO-P
S LO-P
T LO-P
R HI-PF
S HI-PF
T HI-PF
R LO-PF
S LO-PF
T LO-PF
R OVP
S OVP
T OVP
R LVP
S LVP
T LVP
R OPP
S OPP
T OPP
各機能については、以下のシリーズにて流用が可能です。
詳細は添付の相関表ならびに各シリーズの取扱説明書をご覧ください。
出力
- PASS: EAB, EAC, 6600, (6700)
- FAIL: EAB, EAC, 6600, (6700), EAL
- PROCESSING: EAB, EAC, 6600, (6700), EAL
※ 6700シリーズは信号の流用は可能ですが、コネクタ形状が他シリーズと異なる為 注意が必要です
入力
- TEST: EAB, EAC, (6600), (6700), EAL
- RESET: EAB, EAC, (6600), (6700), EAL
- INTERLOCK: EAC, EAL
- Memory: EAB, EAC, (6600), (6700), EAL
※ 6600, 6700シリーズ の入力はオプションの為、ご購入の際にはご注意ください。
6300, 6500 シリーズは他シリーズと異なる為、基本的に流用は推奨しておりません。
ただし、6300, 6500 シリーズ間での流用は可能です。
6300シリーズにアナログコントロール I/Fカード オプション(1538)を搭載し有効にしたとき、フロントパネルの操作はロックされません。
アナログコントロールを有効にしたときは出力電圧と周波数のみが1538からの制御に基づきます。
その他の外部I/FオプションでPCなどからコマンド操作するときは、「Remote」状態となり一部のキー以外の操作できないようにロックされます。
交流電源6300シリーズは、外部インターフェース(USB,RS-232C,GPIBなど)から コマンドを受け取ると自動的に「Remote」状態になります。
この状態の時、リモートコマンドからのみ制御可能となり、 電源本体の前面キーからの操作(出力電圧値設定,電圧出力開始など)は受け付けなくなります。
通常の状態(Local状態)に戻すには,本体前面の「Local」キーを押す必要があります。
(Local状態に設定するリモートコマンドは実装されていません。)
なお、Remote状態でもResetボタンから出力を停止させることはできます。
(リモートコマンドで「TEST」コマンドを送信→6300シリーズ出力開始→Resetキー押下で出力停止が可能です。)
過電流フォールドバック機能がON/OFFどちらであっても、1秒間短絡状態が続いた場合、出力(負荷側)に何らかの異常があると判断し、OCPアラームを表示し、出力を停止します。
過電流フォールドバック機能は通常、A-HI(電流リミッタ)に設定した電流値となるように電圧を上下に制御して安定化を図りますが、短絡している状態に限り、出力異常と判断し、出力を停止するよう設計されています。
6600シリーズ (12)
2016年01月05日受注分よりUSB&RS232Cインターフェースカードが標準装備となりました。
6300シリーズ、6500シリーズ、6600シリーズ、6700シリーズ、EABシリーズ、EACシリーズ、が対象となります。
これ以前にご購入の、標準装備ではない製品へのインターフェースカード追加をご検討の際は製品型名とシリアル番号を合わせてお問い合わせください。
現行のインターフェースカードとの互換性確認のためです。
USB接続でのサンプルコードはこちらをご参照ください。
【 対象製品 】
交流電源に搭載されているメモリのM50(メモリの50番目)またはM50-9、M50-5(メモリの50番目-ステップの9番目 or 5番目)以外のメモリ領域にコマンドを送ると、
コマンドを送るたびに内部のフラッシュメモリへの書き込みが発生します。
一般的にフラッシュメモリには書き込み回数上限が規定されており、交流電源に使用しているフラッシュメモリの書き込み回数上限は約10万回程度となっています。
この回数を超えて書き込みを行うと、フラッシュメモリに書き込めなくなる現象が発生する可能性があります。
インターフェースを使って交流電源を制御するときは、
M50(マニュアルモード動作時),M50-9(AC出力 プログラムモード動作時),M50-5(DC出力 プログラムモード動作時)を指定してください。
指定方法は以下の通りです。
コマンドによる指定
マニュアルモード時
| MEMORY 50 ‘メモリ50を指定 |
DC出力 プログラムモード時 AC出力 プログラムモード時
| MEMORY 50 ‘メモリ50を指定 | MEMORY 50 ‘メモリ50を指定 |
| STEP 5 ‘ステップ5を指定 | STEP 9 ‘ステップ9を指定 |
手動による指定
- メモリ50を選択します。始めに”Memory”を押します。

- テンキーで”50”と入力し”Enter”を押します。
マニュアルモード時はここまでの操作で完了です。
以下のステップはプログラムモード時に必要となります。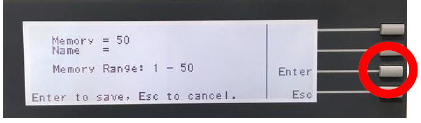
- ステップ9(AC出力時)またはステップ5(DC出力時)を選択します。
始めに”Step”を押します。
- 画面左上のステップ表示が9(AC出力時)または5(DC出力時)になるまで ”Step +”キーを押します。
”Exit”を押すとメインメニューに戻ります。

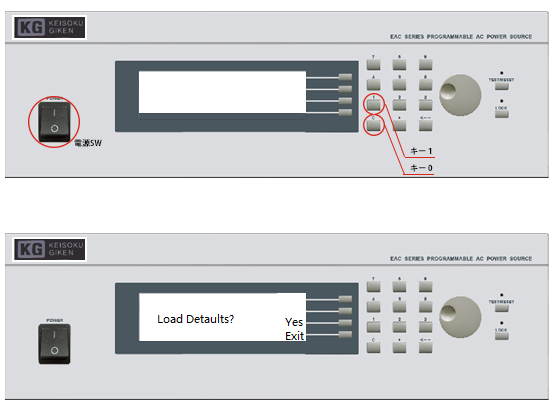
6600/6700シリーズ
- 電子負荷の電源がOFFになっていることを確認します。
- フロントパネルの10キーの0キーと1キーを押しながら電源を投入します。
- 6600/6700シリーズはLoad Defaults? と表示されYesキーを押すと、 Loading….. と表示され再起動します。
6300/6500/6900シリーズ
- 電子負荷の電源がOFFになっていることを確認します。
- フロントパネルの電流表示部の下にある↑キーと↓キーを押しながら電源を投入します。
- 6300/6500/6900シリーズは Step To Init と表示され再起動します。
ファームウェアのバージョンにより、 Step To Init 表示が出ないものもあります。
※初期化を行うとすべての設定情報が消去されます。GPIBカード等が挿入されている場合、アドレスも初期化され8番になりますのでご注意ください。
基本的にインターフェースは工場オプションであり、オプションカードだけ購入して お客様御自身で変更するという事はできません。
どうしても必要という事であれば、一度弊社へ製品本体を送付頂き、カードを弊社にて 変更致します。
実施する場合、以下の3点はお客様にご負担頂く事になりますので予めご了承ください。
(1)オプションカード本来の費用
(2)交換作業費
(3)往復の運送費
御用命の際は、製品本体を購入した代理店(商社)、または弊社へお問い合わせください。
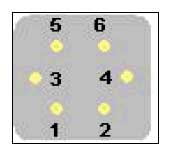
ユニバーサルコンセントの出力端子は以下の通りです。
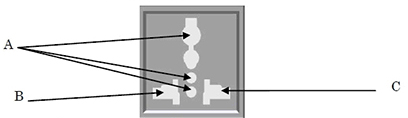
| 番号 | 名称 | 説明 |
|---|---|---|
| A | FG | フレームグランド端子です。 |
| B | 負のサイクルから始まる端子 | AC出力時は負のサイクルから始まる端子です。 DC出力時は”-“端子になります。 |
| C | 正のサイクルから始まる端子 | AC出力時は正のサイクルから始まる端子です。 DC出力時は”+”端子になります。 |
交流電源6600シリーズのリモート制御でTD?コマンドを送ると 現在の6600シリーズの状態をSTATUSとして取得することができます。 STATUSとして取得できる状態の種類と意味は以下の通りです。
| Set | 待機状態(電源投入直後の初期状態) |
| Abort | TEST中にRESETコマンド送ることでTESTを中断した状態 |
| Dwell | TEST中(出力中)の状態 |
| Delay | 電流・電力などが閾値を超えたかの判定を始める前の状態 |
| R-UP | Ramp-up(電圧上昇中)の状態 |
| R-DN | Raump-Down(電圧下降中)の状態 |
| A-HI A-LO | 出力電流値が電流リミットの上限値/下限値を超えた状態(アラーム発生) |
| AP-HI AP-LO | 出力電流値が電流ピーク値の上限値/下限値を超えた状態(アラーム発生) |
| OTP | 本体の過温度保護が発生した状態(アラーム発生) |
| OCP | 出力電流値が定格電流を超えた状態(アラーム発生) |
| OVP | 出力電圧が設定電圧より大きくアラームが発生した状態 (LOWレンジで5V以上,HIGHレンジで10V以上の差が出たときに発生) |
| LVP | 出力電圧が設定電圧より小さくアラームが発生した状態 (LOWレンジで5V以上,HIGHレンジで10V以上の差が出たときに発生) |
| OPP | 出力電力値が定格電力を超えてアラームが発生した状態 |
| A-SH | アンプ回路に異常が発生しアラームが発生した状態 |
6600シリーズのリモート制御において、「TD?」コマンドと「TDVOLT?」コマンドの両方で測定電圧値を取得することができますが、この二つの値は同等です。
この取得したデータの長さは取得したタイミングによって変わりますが、 最大でも249バイトとなります。
交流電源6600シリーズにおいて、「TD?」コマンドを使うと、 リアルタイムの測定電圧値、測定電流値などを一括して取得することができます。
SDCTコマンドやSDVOLTコマンドなどのサージ/ドロップ機能に関するコマンドは、サージ/ドロップ機能がオンになっている(「SD?」コマンドで1が返ってくる)ときのみ有効となります。
6600シリーズ 6700シリーズのRS-232C通信において、「TD?」(テストデータ取得コマンド)は100msのインターバル開けることで連続的にデータを取得することができます。
つまり、100ms毎の測定データをRS-232C通信で取得することができます。
6700シリーズ (4)
交流電源 6700シリーズにおいて出力の開始時/終了時の位相角度を設定することができますが、この設定が有効となるのは出力開始時または出力停止時のみ有効となります。
プログラムモードで複数のステップをつなげて試験を実行した場合,各ステップの開始点及び終了点の位相角度を指定することはできません。
接続されているU.U.T.(被試験物)にコモンモードノイズが発生している場合、コモンモードノイズ電流が6705内へ流入している事があります。この場合GP-IB通信に悪影響を与えることがありますので注意が必要です。
GP-IBケーブルを他のケーブルと分離することにより、コモンモードノイズの影響を低減します。また、6705の出力ケーブルにクランプコア型のノイズフィルターを挿入することで効果がある場合があります。
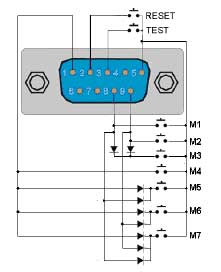
6700シリーズには,下図のような出力インターフェースが標準で装備されています。
この出力インタフェースの接点定格は1AAC/125VACです。
耐圧試験器(交流)と同じ定格となります。
(オプション)
(標準装備)
またオプションの9ピンD-sub型コネクタを使用したりリモート入力インターフェースで”Test”、”Reset”、 7つのメモリM1~M7の外部制御が可能となります。PLCリモート機能はシステム設定パラメータのPLCリモート設定を”ON”とすることにより 有効となります。
追加オプションPLCリモートのD-SUBコネクタの形状は、 以下の通りです。

形状:D-SUB9ピン オス
EABシリーズ (4)
位相が90度ずれた2相交流を直接出力できる交流電源はありません。
ひとつの方法として3相出力が可能な交流電源を用意し、出力にスコットトランスを接続することで実現可能です。
只今、弊社で取り扱っている交流電源では対応している機種はありません。
- 6300シリーズ
- 6500シリーズ
- 6700シリーズ
- 6600シリーズ
- EABシリーズ
- EACシリーズ
可能です。
構成例としては、以下の通りです。
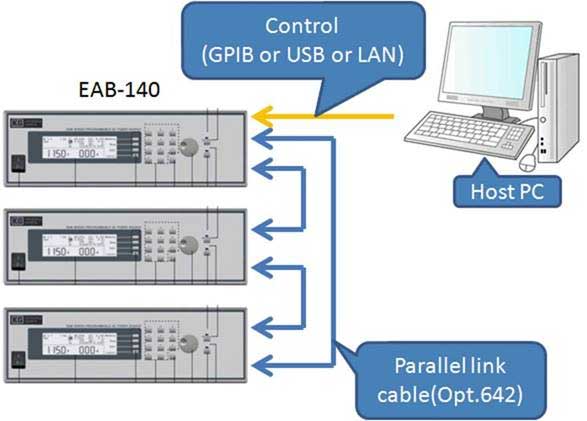
3相電源として3台のEABシリーズをパラレルで接続し、マスター機にリモートコマンドを送って全てのEABシリーズを制御します。
EABシリーズを並列接続するためにはOpt.642(並列/多相連結カード)が必要になります。
またリモートコマンドを使うためには、GPIBインタフェース、USB&232Cインタフェース、LANインタフェースの いずれかを選択する必要があります。
また、TDコマンドなどで取得できる測定値は、マスター機のみから取得できます。
交流電源EABシリーズにおいて、メモリ・ステップを一括でクリアするようなコマンドは実装されていません。
代替え案としては、制御ソフトウェア上にメモリ・ステップのデフォルト値を持っておき、クリアを実行するときに各メモリ・ステップにデフォルト値を書き込んでいくような処理を入れることとなります
EACシリーズ (5)
単相はひとつのベクトル成分しか持ちませんので、複数のベクトル成分をもつ三相を得ることはできません。
スコットトランスは三相-単相変換を行うことができますが、単相側は90度位相のずれた2相出力となりますので、これを逆に接続して三相を得るためには、90度位相のずれた2相を必要としますので単相のみではできません。
全く別の方法として、単相入力三相出力の交流電源を用意すれば当然、三相出力を得ることが可能です。
任意のひとつの相のみ瞬停動作させる事が可能です。
3つの相を同時、もしくは相対的に瞬停させる動作はできません。
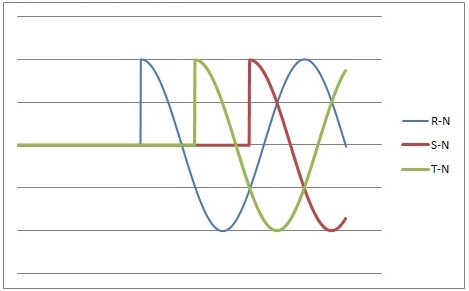
開始位相を90°に設定したときの波形は次のようになります。
R相を基準にして出力が開始されます。
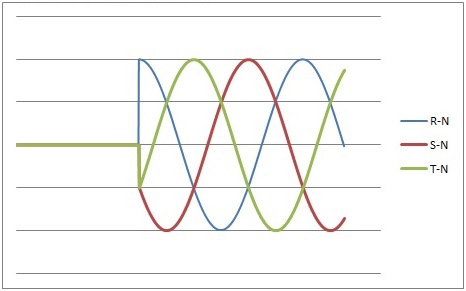
各相それぞれの開始位相が90°になる訳ではありませんのでご注意ください。
次のような波形にはなりません。
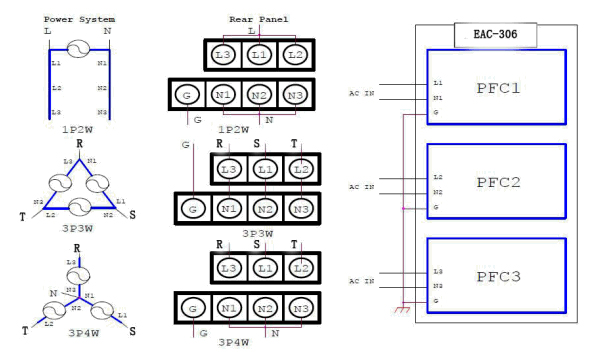
EACの電源入力方式はいくつかあります。
工場出荷時は単相2線となります。 そのほか、三相4線(Y結線)と三相3線(デルタ結線)があります。
それぞれの配線図は下記のようです。
8500 STD/ADV(旧EAL)シリーズ (2)
EALシリーズのLISTモードは、ADVとSTDでステップのパラメータが一部異なります。
ADVでは電圧、周波数の設定に開始->終了で指定が可能ですが、STDでは電圧、周波数の設定はステップ毎に固定になります。
このため、下記のような違いが有ります。
ADV:階段状と、傾斜を付けた(ランプアップ的な)ステップが組めます。
STD:階段状のステップが組めます。
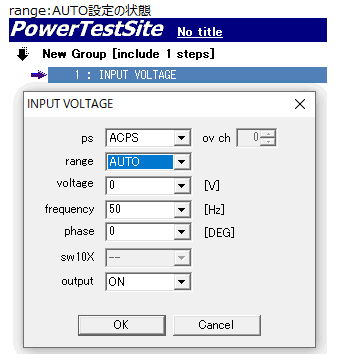
本装置はLow/Highの2つの出力電圧レンジを持っており、通常Low(0-150V出力)レンジで起動する仕様です。
High(0-300V出力)レンジへの切替が発生するタイミングで内部的に切り替えが発生し、一時的に出力が切れます。
恐らくPowerTestSiteの現状設定は、renge:AUTOになっているものと思いますが、本症状の回避方法としては、PowerTestSiteエディタのINPUT Volt項目で、レンジをHigh:200に固定してしまう方法があります。
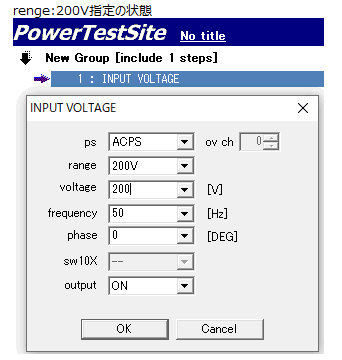
変更に際しての注意点としては、電圧レンジはHigh:200では高い電圧は出せますが、電流が定格の半分になります。
逆に、Low:100レンジでは、電圧は出せませんが、定格電流が取れるようになります。
WSシリーズ (4)
RoHSに対応しています。
※RoHS…電子・電気電子機器に含まれる特定有害物質の使用制限に関する指令です。
対応しています。
- Function F-22の設定を確認します。
● WX-OP01のREADYランプが点灯しているかを確認してください。
● F-22の設定が”1″になっているかを確認してください。※F-22の設定が”0″になっている場合でもWX-OP01のREADYランプが点灯しますので注意してください。
- GP-IBアドレスが0以上になっているかを確認します。
基本的な設定は初期値をそのまま利用し、電圧を10Vに設定、そのときの各種測定値を取得するという一番シンプルな処理は以下のようになります。
コマンド例
| 1 | SOUR:VOLT:LEV:IMM:AMPL 0.0 | 0Vを設定します。 |
| 2 | SOUR:CURR:LEV:IMM:AMPL MAX | 設定可能な最大電流値を設定します。 (WS-360Bなら13.5Aが設定される。) |
| 3 | OUTP:STAT:IMM ON | 出力ONします。 |
| 4 | SOUR:VOLT:LEV:IMM:AMPL 10.0 | 10V設定します。 |
| 5 | MEAS:SCAL:VOLT:DC? | // 電圧を測定しま。 |
| 6 | MEAS:SCAL:CURR:DC? | 電流を測定します。 |
| 7 | MEAS:SCAL:POW:DC? | 電力を測定します。 |
| 8 | ※ | |
| 9 | OUTP:STAT:IMM OFF | 出力OFFします。 |
1,2でDC電源の初期設定し、3で出力をON。
4で電圧を設定し、5~8で各種測定。
9で出力をOFFし終了。
と言った動作になります。
4の電圧設定値を変更しながら4~8を繰り返すことで、入力電圧変動など特性を試験するプログラムになります。
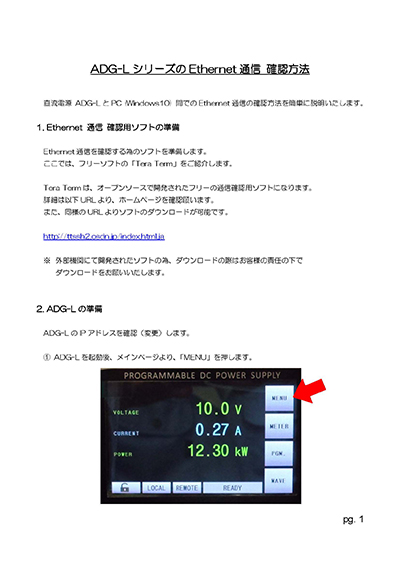
ADG-Lシリーズ(1)
以下のドキュメントをご参照ください。
3260Aシリーズ (7)
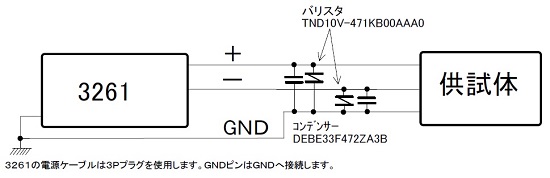
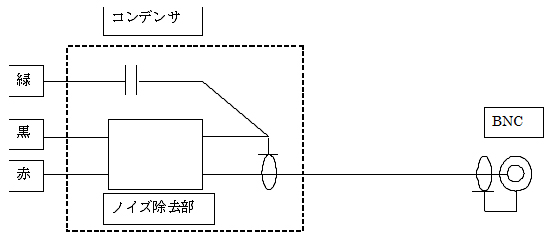
負荷端子及び電圧端子とFG間の耐電圧はDC500Vです。帯電やその他の原因によりこの電圧を越えた事が考えられます。負荷端子とFG間にバリスターを実装して下さい。又スパイク状の電圧が印加される事が予想される場合はコンデンサーを 実装して下さい。コンデンサーの実装は微小ですが測定値へ影響がありますので確認をお願いします。
3261負荷端子とFG間へバリスタの接続方法
負荷部に故障が発生した原因の可能性として負荷端子とFG間に静電気等による 帯電の為高電圧が発生しこれによる電流が負荷端子より内部へ流入した可能性が あります。バリスタの実装をお願いします。帯電した電位はバリスターによりGNDへ 放電する事ができます。又供試体よりコモンモードノイズ電流が発生している可能 性がある場合は並列にコンデンサーの実装をお願いします。
3260シリーズと3260AシリーズのGP-IBコマンドは互換性を持っています。
※3260と3260Aの違いは?
対応周波数のみ異なります。
→3260は周波数70Hzまで、3260Aは400Hzまでとなっております。
供試体がインバーターなどノイズを発生している場合、これより発生するコモンモードノイズ電流が3260Aの中を通過し3260Aが誤動作することがあります。
このような場合、入力側にコモンモードフィルターを挿入すると改善することがあります。
これは負荷設定値に対する2つのメモリとして機能し、2つの設定値を切り替えながら負荷を引くときに便利な機能となります。
例えば、CCモードで1Aと2Aを切り替えながら負荷を引くとき
Level A = 1.0A
Level B = 2.0A
としておきLevelを切換えながら負荷を引きます。
Levelの切換えは、前面パネルの[Level]キー、または、リモートコマンドのLEVコマンドで行います。
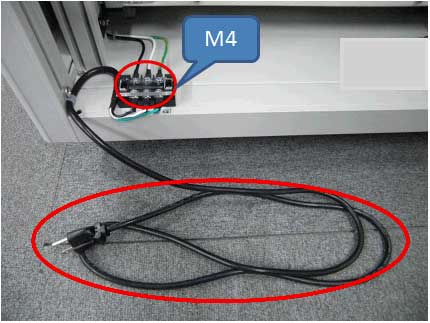
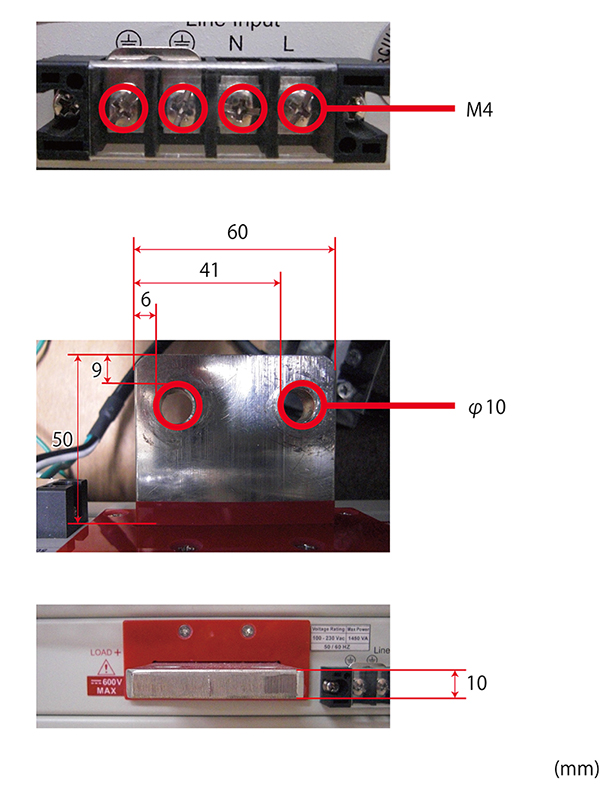
ACケーブルのプラグ形状は3Pオスとなります。長さは約1.7m、端子台のネジ径はM4です。
保管温度は-40℃から85℃までです。
動作温度ではないことに注意してください。
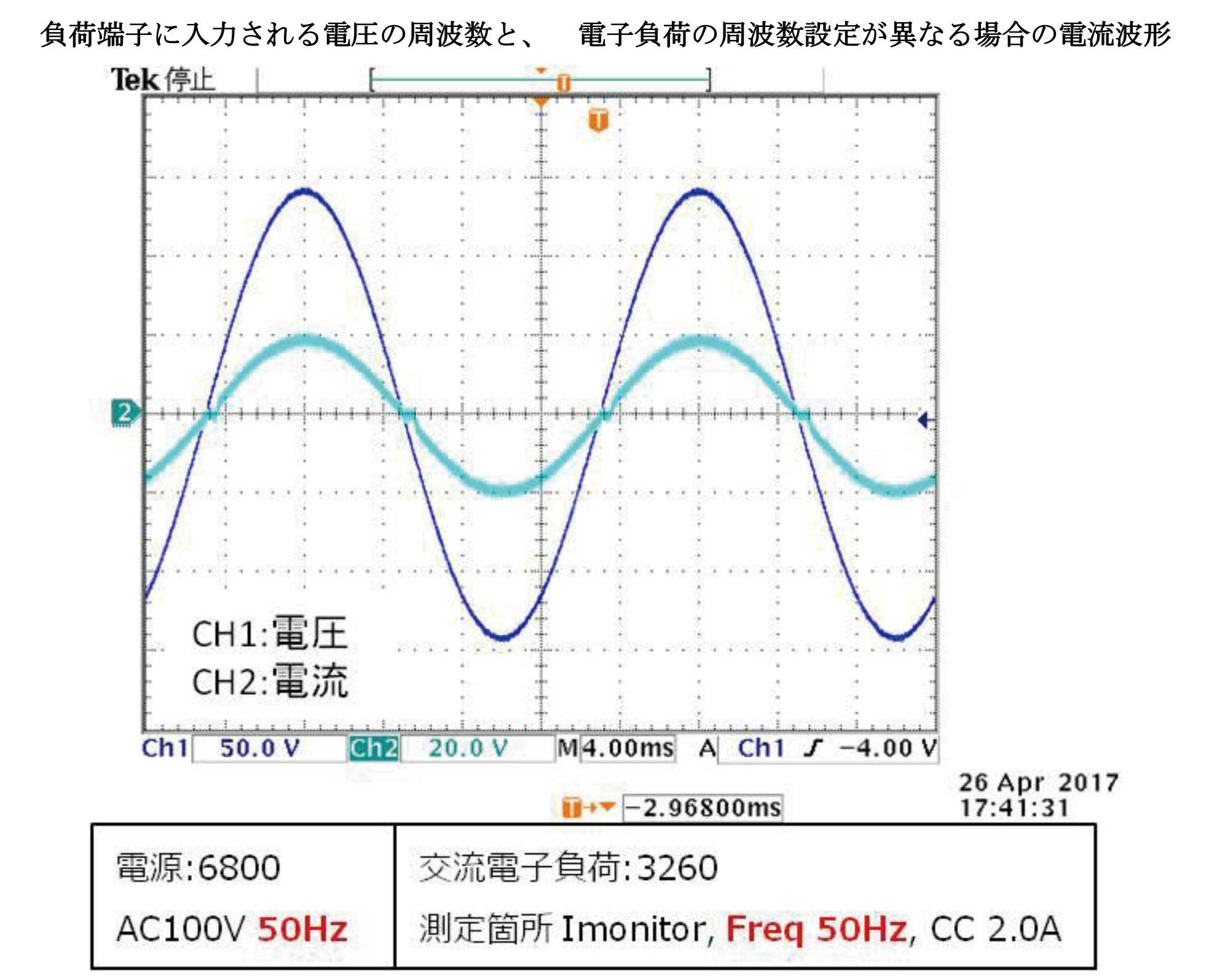
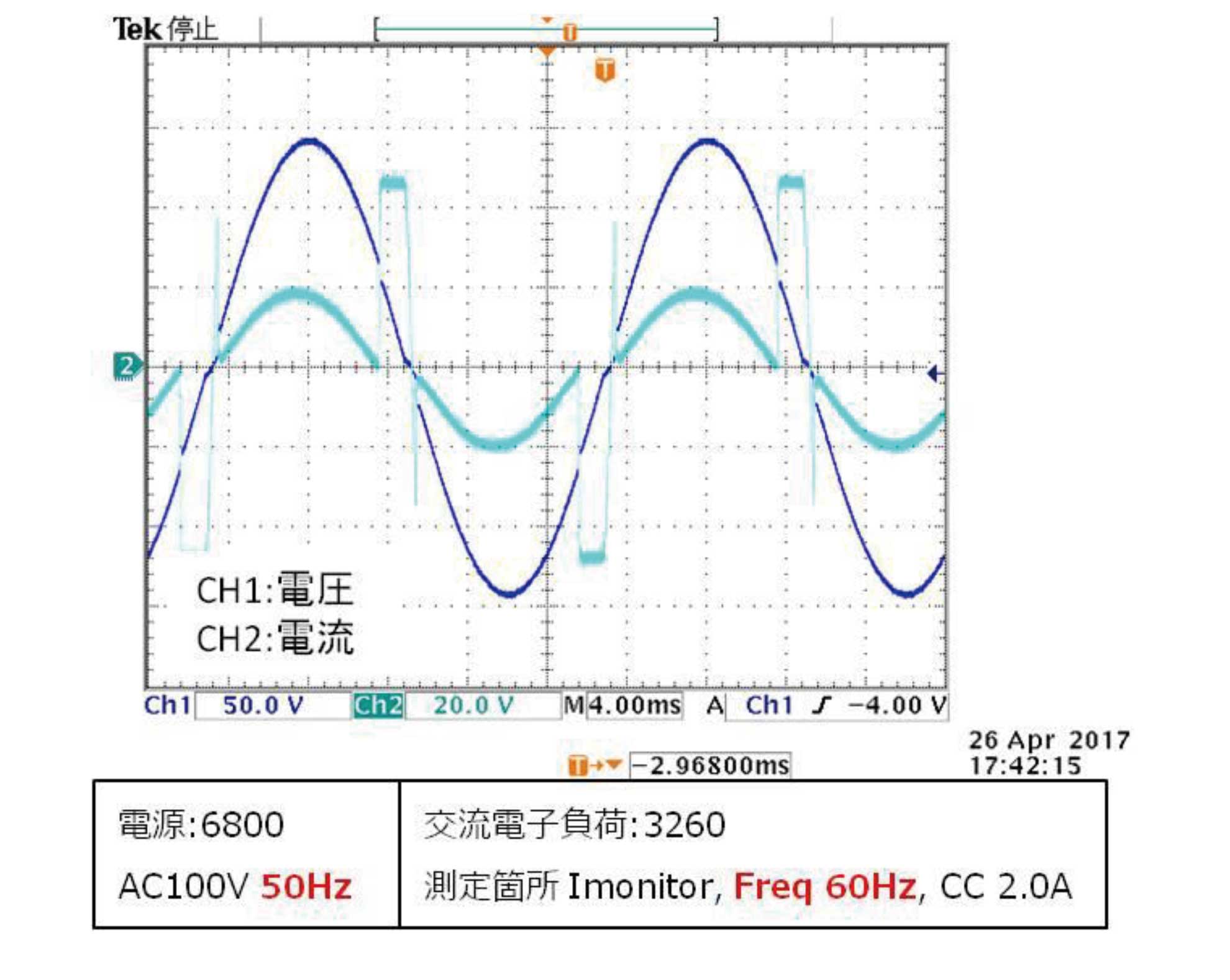
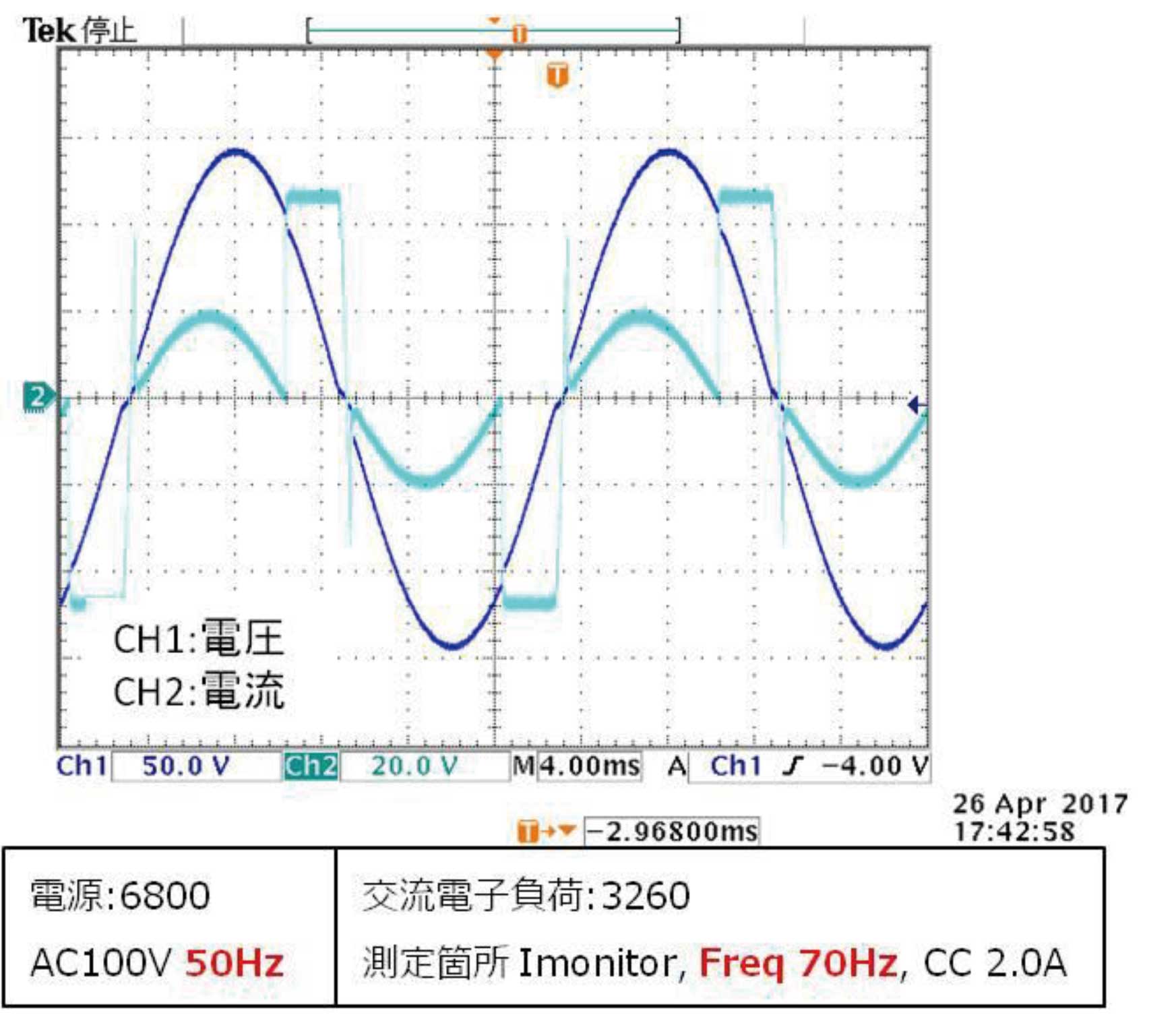
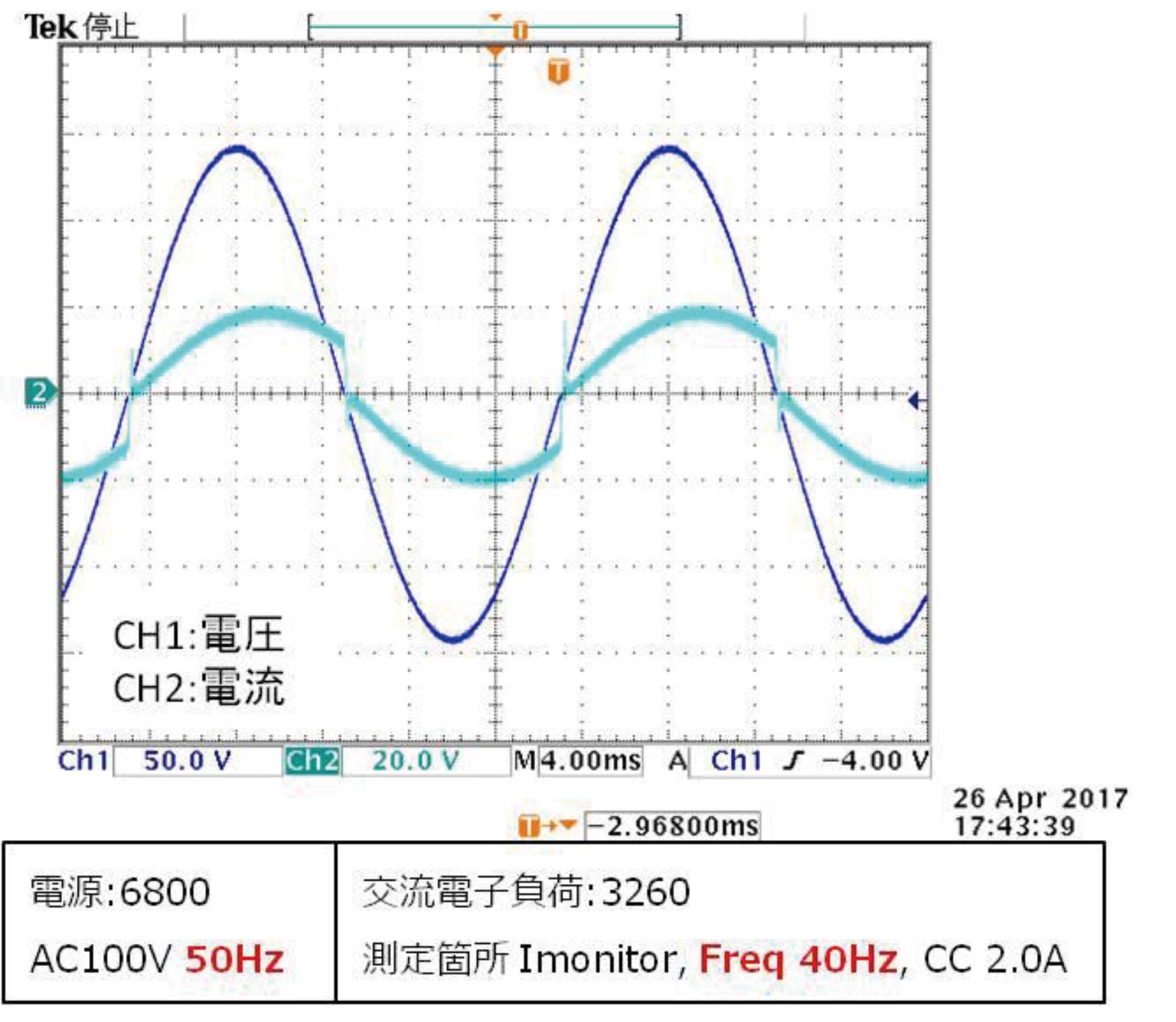
負荷端子に入力される電圧の周波数と、電子負荷の周波数設定が異なると、波形が大きく乱れます。
- 負荷端子に入力される電圧の周波数と、電子負荷の周波数設定を合わせるか、Auto Freqモードにしてください。
- Sync入力がない場合はSyncをOFFにしてください。
3270シリーズ (5)
INRUSHとSURGEはMainframe F/W R2.00 で追加された機能となるため、これ以降のバージョンで使用できます。
R1.03以前のファームウェアでは使用することは出来ません。
3270のハードウェア自体が異なるため、Mainframe F/W はR1.xxからR2.xxにアップデートすることは出来ません。
他にも出荷時期で対応機能が異なる場合があります。ご利用の3270で最新の取説記載の機能が全て動作するかはお問い合わせください。
発振を収める方法として
- ケーブルの配線長を短くして、太いものを使用する
負荷ケーブルが長いと電線のインダクタンス成分が増加し、発振する可能性があります。 - 負荷装置のBW(帯域幅)の設定を変更する
発振している状態で、CONFIGキーでBWの設定値を下げます。(0-15まで設定ができ、デフォルトの設定が13となっております。この値を上げると応答性が上がり、値を下げると応答性が下がります)
USBでリモート制御するサンプルコードはこちらをご参照ください。
LANで制御するサンプルコードです。
使用するにあたり、ocxファイルの登録が必要になります。
詳細は添付のPDFをご覧ください。
当機種のモニターは、負荷端子に印加される電圧の交直に応じて、出力されるモニター電圧の交直が変わります。
また、各モニターにおいてフルスケールの換算が以下のようになるので、ご注意ください。
3270の場合、定格 350Vrms に対し、ピーク値をフルスケール10Vとしています。
その為、350 * √2 = 494.9Vpk を 10Vとして 換算してください。 [Iモニター]
当機種にはターボ機能が搭載されており、短時間にて定格の2倍の電流が流せる事ができ、
そちらをフルスケール10Vとしています。
その為、3270の場合は定格37.5Armsを半分の5Vとして換算してください。
なお、モニター電源は当機種の各モニターから供給されているので、
使用したいモニターにケーブルを接続するのみでそのまま確認が可能です。
Load Stationシリーズ (27)
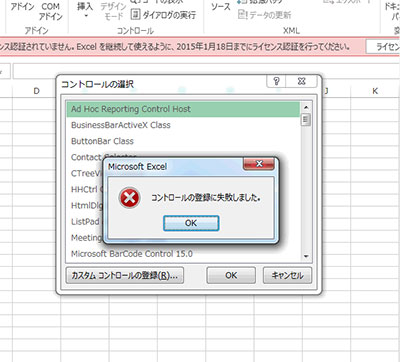
上記のエラーが出る場合は、以下の手順で登録を行ってください。
- 添付CDのDriverフォルダーにあるDPInst.exeをダブルクリックしUSBドライバーをインストールします。
- LNシリーズとPCをUSBで接続し、ドライバーのインストールを完了させます。
- デバイスマネージャー上にLNシリーズが表示されていることを確認します。
- Excelを起動しOCXの登録を行って下さい。
LNシリーズのCRモードにおける設定確度の考え方
電子負荷は、内部の半導体回路を用いて、端子にかかる電圧及び電流から、抵抗値を設定していますので
設定範囲内の動作となります。
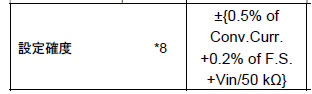
設定確度は以下の様な換算となります。
±{ (VIN/設定抵抗値の理想電流)×0.5% + 電流レンジのフルスケールの値×0.2% + VIN/50kΩ }
例えば LN-300A 電流レンジH(60A) VIN:30V I:10A で3Ωを設定する場合
(10V/3Ω)×0.5% + 60A×0.2% + 30V/50kΩ = 0.13726A … この値が10Aに±の範囲になる。
10A + 0.13726A = 10.13726A 30Vの電圧時 設定抵抗min 30V/10.13726A = 2.95Ω
10A - 0.13726A = 9.86274A 30Vの電圧時 設定抵抗max 30V/9.86274A = 3.04Ω
設定値 3Ωに対しては、電圧が30Vの場合 2.95Ω~3.04Ωの範囲となります。
CVモードで動作時に、設定電圧にならず「OVER CURRENT」アラームが出る場合は、電流レンジ及びカレントリミット設定を見直してください。
例えば、10V5Aの電源へLN-300C(500V/12A/300W)電子負荷を接続し電子負荷のCV設定を5Vにした場合、
電流レンジが適切に設定されている場合は、設定電圧5Vに制御されるが、電流レンジがL(1.2)となっていると
電圧が設定値まで到達せずアラームで停止します。

電流レンジを最適化します。

LNの持っている機能をLN内部のソフトでコントロールすることもよりMPPTに対応します。
そのためハードの変更は無く、MPPTオプションを追加しても電子負荷の基本的な機能は変わりません。
原因① 過電流保護設定のリミットが働いている
過電流保護機能として電流リミットを設定し、その電流に到達した場合は、レンジの状態に関わらず機能します。
対策: 電流リミットの値を見直してください。
原因② 下位レンジのリミットが働いている
電流レンジの切替境界の付近で計測値が留まると、タイミングによっては下方のレンジの最大値検出が働き、上方のレンジに移行せず「OVER CURRENT」として出力がOFFとなる場合があります。
電子負荷は電圧・電流レンジごとにそれぞれCR負荷量の調整値が設けてあります。
同じCR設定値でも、電圧レンジを変えるだけで負荷電流が若干変動しますのでそれに伴い電流リミット動作につながった可能性があります。
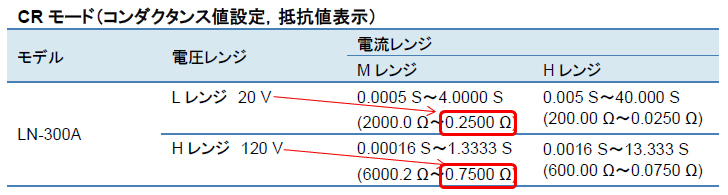
LNシリーズの、CRモードに対する電流オートレンジの切替タイミングは以下の通りです。
例)LN-300Aの場合
電圧レンジ(L:20V)に設定すると、電流レンジはMレンジから0.2500Ω以下を検出するとHレンジに自動で切り替わります。
電圧レンジ(H:120V)に設定すると、電流レンジはMレンジから0.7500Ω以下を検出するとHレンジに自動で切り替わります。
例えば、電圧を1Vにしていただき、抵抗値を可変すると、電流レンジが自動で切り替わる様子がご確認いただけます。
また、LN-300A電流のレンジのMレンジリミットは以下の通り6Aとなります。
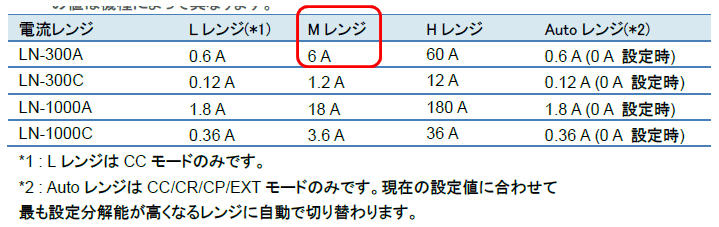
CRモードでは、安全設計の為、低電圧時に急激に過大な電流が流れることを防ぐ目的で、レンジのリミットに達した際にアラームが出る仕様となっております。
「OVER CURRENT」アラームが出てしまう場合、電圧Lレンジでの電流オートレンジ切替ポイントとなる0.25Ω到達前にMレンジリミットが働いたものと考えられます。
対策: 電流オートレンジを電流Hレンジに切り替えてご使用ください。
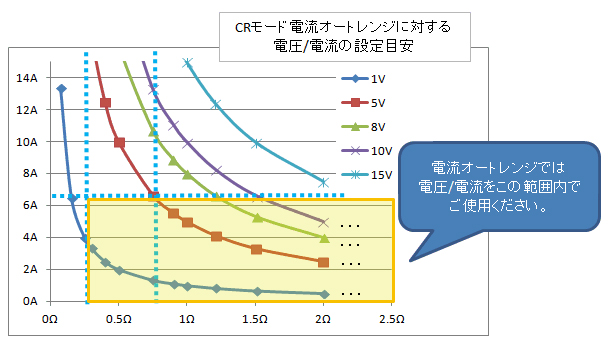
参考)電流オートレンジの場合の電圧/電流設定目安
対応しておりません。
CPモードは負荷端子に印加された電圧から電力を計算して負荷電流を設定するため、負荷端子に電圧が印加されていないと最大電流を
流そうと設定します。そのためOver Currentアラームが動作します。
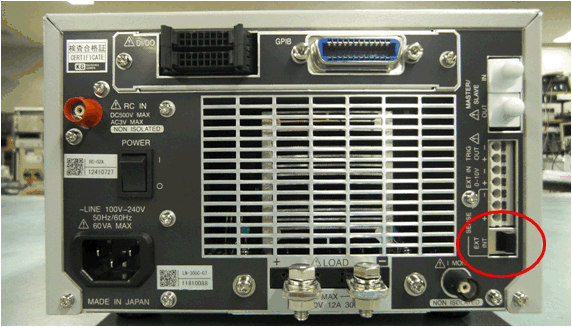
Load Stationシリーズ で負荷電圧が実測値より0.5V程度ずれてしまう場合、リア側のパネルにリモートセンシングスイッチがあります。通常はこのスイッチがINT側になっているのですが、EXT側になっている状態で、リモートセンシングを行っていない場合は、実測値より少しずれて測定されてしまいます。リモートセンシングを行わずお使いの場合はリモートセンシングスイッチをINT側にしてお使いください。
LNにつきましては、お客様の手によるファームウェアバージョンアップは対応しておりません。
また、後継機であるLN-300A-G7、最新機種のLN-300Aとは一部基板が変更されているため、LN-300A-G6とファームウェアが完全互換ではありません。
Office365で使用する場合、32ビット版のExcelを選択して使用してください。
制御ソフトは32bitのOCXを使用しています。
Windows 10 64Bit + Excel365 32Bitの組み合わせについて、手動でActiveXコントロールを登録することでExcel365から使用できます。手動による登録方法を説明します。
コマンドプロンプトを管理者権限で開きます

コマンドプロンプトにて以下の様に入力します。

■パス入力についての補足
パスの入力は、途中まで入力した後にTABキーを押すことで補完されます。

↓TABキーを何回か押すと以下のようになります。

末尾のダブルクォーテーションを削除して\TDKを入力したのちにTABキーを押すと次の階層のフォルダーが補完されます。


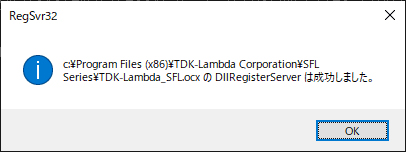
登録が完了すると以下の様に表示されます。
この手順で登録を行うことでExcelでの登録は不要になります。
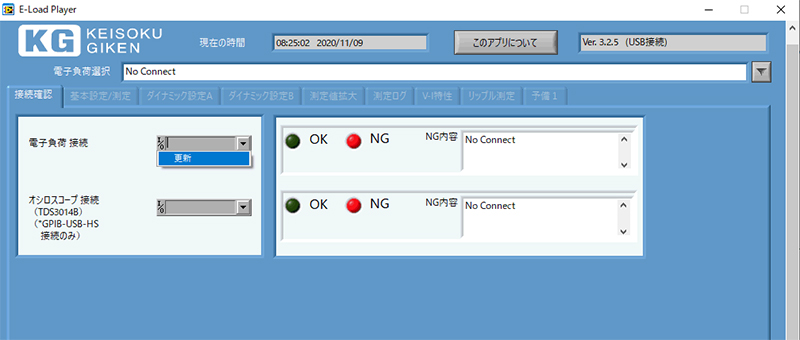
E-Load Playerのバージョンを更新したり、新規でインストールした際に、USBドライバの設定がリセットされてしまう場合があります。
デバイスマネージャーでUSBドライバが正しく認識されているかをご確認ください。
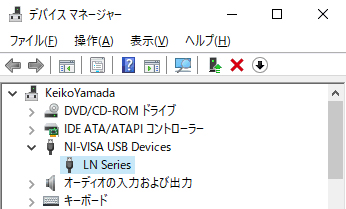
VISAによるUSBドライバとKGによるUSBドライバが共にインストールされている場合は、HPのサポート情報からソフトウェアのダウンロードより「USBドライバーインストール説明書」の”USBドライバについてKG用とVISA用を切替て使う場合”をご確認いただき切替を行ってください。
E-Load Playerから設定する際に、負荷に応じた適切なレンジの設定を設定してください。
電流値が小さい場合はLOWレンジへの切り替えで、適切なスルーレートが確認いただけます。
LN本体の電流レンジ設定より大きなスロープ設定値を制御ソフトで設定した場合に表示されます。
制御ソフトのスロープ設定値デフォルトは10Aになっていますので、LNの電流レンジを10Aより大きくするか、または制御ソフトのスロープ設定値をLNの電流レンジより小さな値に変更してください。
E-Load Playerから設定する際に、負荷に応じた適切なレンジの設定を設定してください。
電流値が小さい場合はLOWレンジへの切り替えで、適切なスルーレートが確認いただけます。
- 光源を人工的に確保するためにフラッシュを用いる場合(負荷モードについて)光源を実動作に近い形で人工的に用意するのは、PVの効率を考えると電力的にかなり大きなものが必要となります。このためフラッシュを使い瞬間的に光量を上げて計測する場合があります。
フラッシュを使用した場合、PVには数msec~数10msec程度の間だけ光が当たることになり、この間だけPVから出力されることになります。また、数msecで出力電圧が立ち上がることにもなります。
この時使用する電子負荷の負荷モードは、CCもしくはCVが考えられますが、CVの場合は応答が数10msec以上と遅いために、フラッシュ点灯の間に収束しない場合があります。このため、こういった用途の場合は、CCモードで計測してください。 - 光源を人工的に確保するためにフラッシュを用いる場合(電子負荷について)前述したように、フラッシュを使用したPVのI-V特性取得では、電子負荷装置に数msecで立ち上がる電圧が印加されます。弊社LNシリーズでは、このような0Vからの電圧立ち上がりに対しても電流のオーバーシュートが出にくい設計となっております。他社電子負荷装置では問題が発生する場合がありますので注意が必要です。
- 開放電圧を測定する場合I-V特性を取得する結線のまま開放電圧を測定すると、電子負荷装置のLoadをOffにしても、数mA程度の電流が流れるために正確に計測できない場合があります。開放電圧測定時には、外部の結線を外して測定してください。
- オシロスコープ等のGNDがFGに落ちているような機器で観測している場合、3P等で接続していないかを確認します。
- 供試物の出力にクランプコア等を付けてノイズが小さくなるかを確認します。
上記二点により改善する場合はコモンモードノイズによる影響と推測されます。
- GPIB及び、USBは、負荷端子台とはアイソレートされております。
GPIB及び、USBのグランド側はFGに接続されております。 - 負荷端子台はFG(シャーシ)ともアイソレートされています。
また、負荷端子台のグランド電位は、外部制御電圧端子、電流モニタ端子と同電位となっております。 - 絶縁耐圧ですが、各端子間耐圧は以下の通りです。
負荷端子 – FG間 DC500V
外部制御電圧端子 – FG間 DC500V
電流モニタ端子 – FG間 DC500V
-G6と-G7の機種を混在した状態でマスター・スレーブ機能を利用することはできません。
コマンド送信後の待ち時間として設定している200msは、動作保証の上で必要な時間となります。従って、製品の仕様上この時間よりも短縮することはできません。
電子負荷装置の直列接続はできません。
電子負荷装置は通常定電流動作を基本に他のモードを模擬的に作り出しています。
CRやCVモードのように印加される電圧がバランスしそうなモードでも瞬時にバランスすることはなく耐圧オーバーとなる場合があります。
電子負荷装置はMOSFETのような半導体で電力消費するようになっていますので耐圧方向に対しての完全な破壊保護(警告としてのアラームはあります)はありませんのでご注意ください。
マスター機のみにMPPTのライセンスがあれば、マスター/スレーブ構成でMPPT機能を使用することが可能です。
マルチ構成の場合、マスター機のみにMPPTのライセンスがある場合はスレーブ機はMPPTの機能を使用することはできません。
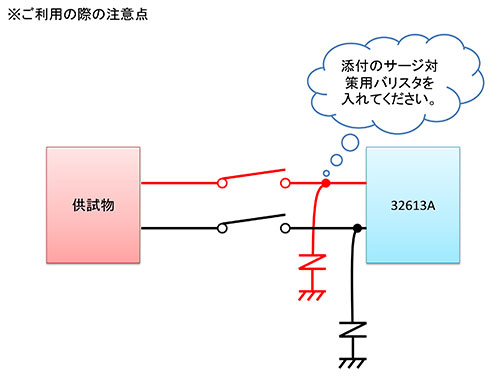
電子負荷のLOADがOFFの状態であれば問題ありません。
電子負荷のLOADがONの状態で印加されると故障する恐れがあります。
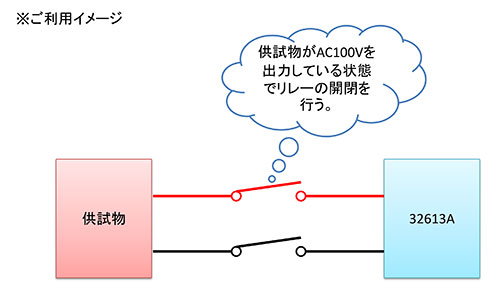
また、リレーによる系統の開閉は相手方がフローティングの場合、相手方の帯電により電子負荷が絶縁破壊を起こして故障する恐れがあるため、開閉がある・なしにかかわらず事前の予防対策として、添付のバリスタを電子負荷の負荷端子につけて利用するようにしてください。
可能です。
以下、その手順です。
- 電子負荷の電源がOFFになっていることを確認します。
- フロントのEnterキーを押しながら電源を投入します。
- KGロゴが表示されるまでキーを押し続けます。
※初期化設定は、こちらのマニュアル付録A(P211)にも記載されておりますのでご参照ください。
シャント出力を、帯域2Hz程度のアナログフィルタを通し計測しています。
これを20usec程度の間隔で常時内部で測定しており、
コマンドがきたときの最新の値を返すような形です。
レンジ切り替えありません。シャント相当として、0.5Ωです。
この現象はWindows Vista以降のOSで発生します。
以下の手順でドライバーの更新を行ってください。
- デバイスマネージャーを開きます。
- LNの電源を投入しPCにUSBで接続します。
- 接続後に表示された”不明なデバイス”で右クリックし、削除をクリックします。
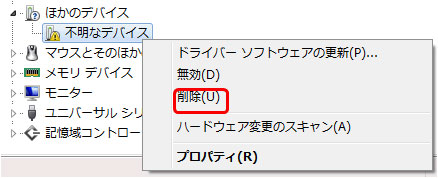
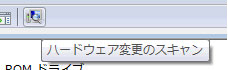
- デバイスマネージャーのハードウェア変更のスキャンをクリックします。
- 変更のスキャン後に”LN-xxxx-Gx”で右クリックして削除をクリックします。
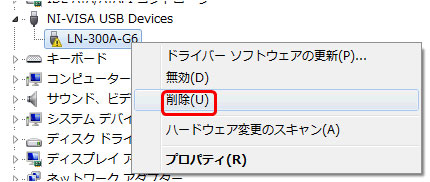
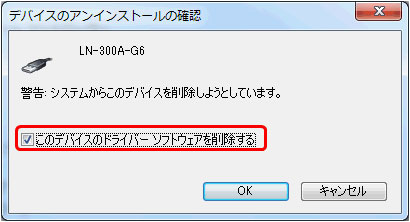
- “このデバイスのドライバーソフトウェアを削除する”にチェックを入れてOKをクリックします。
- ドライバーの入っているフォルダーから”LN-XXXX-G6_32bit_64bit.inf”を削除します。

- 再度デバイスマネージャーのハードウェア変更のスキャンをクリックします。
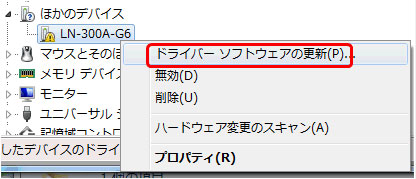
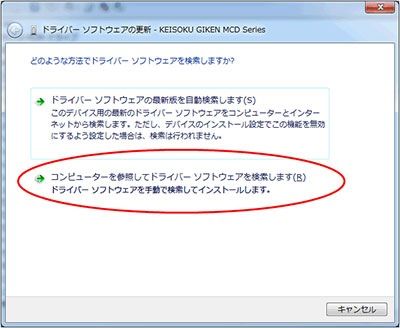
- “LN-xxxx-Gx”で右クリックしてドライバーソフトウェアの更新をクリックします。
- コンピュータを参照してドライバーソフトウェアを検索しますをクリックします。

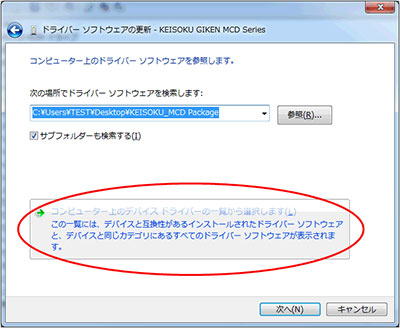
- コンピューター上のデバイスドライバーの一覧から選択しますをクリックします。

- ドライバーが入っているフォルダーを選択して次へをクリックします。

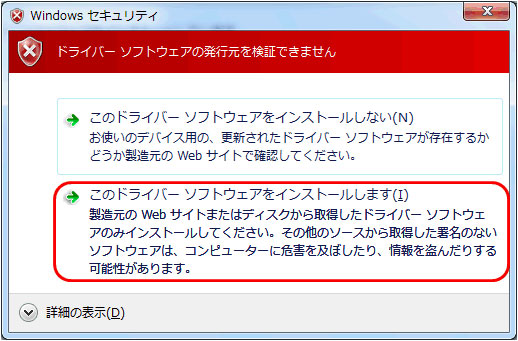
- このドライバーソフトウェアをインストールしますをクリックします。
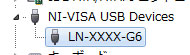
- 正常に認識されるとデバイスマネージャーに以下のように表示されます。
LNシリーズでは、他の負荷モード同様ダイナミック負荷も”モード”として独立している為です。
Load Edge/Load Starシリーズ (5)
DYNAMICモードで、最初の1サイクルから負荷を設定すると、ロードオンで最初からHIGHレベルが出力されトリガーがかけられない場合があります。最初の1サイクルは無負荷(0A)とし、2サイクルから負荷を設定する事を推奨します。

電流レンジが適切に設定されていない可能性がありますので、レンジのご確認をしてください。
- 光源を人工的に確保するためにフラッシュを用いる場合(負荷モードについて)光源を実動作に近い形で人工的に用意するのは、PVの効率を考えると電力的にかなり大きなものが必要となります。このためフラッシュを使い瞬間的に光量を上げて計測する場合があります。
フラッシュを使用した場合、PVには数msec~数10msec程度の間だけ光が当たることになり、この間だけPVから出力されることになります。また、数msecで出力電圧が立ち上がることにもなります。
この時使用する電子負荷の負荷モードは、CCもしくはCVが考えられますが、CVの場合は応答が数10msec以上と遅いために、フラッシュ点灯の間に収束しない場合があります。このため、こういった用途の場合は、CCモードで計測してください。 - 光源を人工的に確保するためにフラッシュを用いる場合(電子負荷について)前述したように、フラッシュを使用したPVのI-V特性取得では、電子負荷装置に数msecで立ち上がる電圧が印加されます。弊社LNシリーズでは、このような0Vからの電圧立ち上がりに対しても電流のオーバーシュートが出にくい設計となっております。他社電子負荷装置では問題が発生する場合がありますので注意が必要です。
- 開放電圧を測定する場合I-V特性を取得する結線のまま開放電圧を測定すると、電子負荷装置のLoadをOffにしても、数mA程度の電流が流れるために正確に計測できない場合があります。開放電圧測定時には、外部の結線を外して測定してください。
- GPIB及び、USBは、負荷端子台とはアイソレートされております。
GPIB及び、USBのグランド側はFGに接続されております。 - 負荷端子台はFG(シャーシ)ともアイソレートされています。
また、負荷端子台のグランド電位は、外部制御電圧端子、電流モニタ端子と同電位となっております。 - 絶縁耐圧ですが、各端子間耐圧は以下の通りです。
負荷端子 – FG間 DC500V
外部制御電圧端子 – FG間 DC500V
電流モニタ端子 – FG間 DC500V
可能です。
Enterキーを押しながら電源を入れてください。
※この内容は取説に記載されておりません。
3300Fシリーズ (5)
直流電子負荷「3310Fシリーズ】の測定値(電圧・電流)は、約50[ms]毎に1回、測定データを取得しています。
直流電子負荷 3300F(4chフレーム)において,RS-232C通信でGLOB:MEAS:VOLT?を連続的に送信するときは,送信するコマンド間に250ms程度のインターバルが必要となります。
つまり,250ms間隔で測定電圧値を取得することができます。
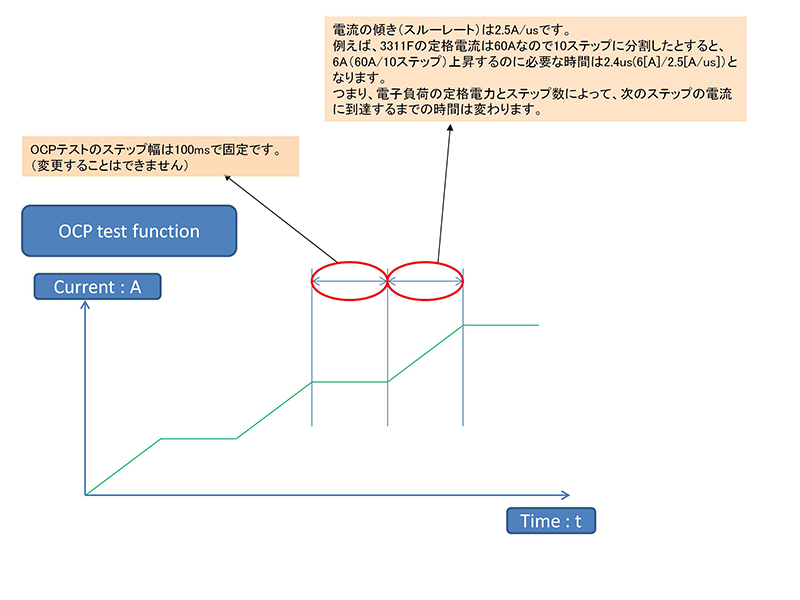
直流電子負荷3310Fシリーズに搭載されているOPCテスト機能において、各ステップの電流の時間幅は100msとなります。
また、次のステップの電流値に到達するまでの時間は、電子負荷の定格電流と分割ステップ数によって決まります。
3332FのCCモードでの負荷電流設定は、常にHigh設定値>Low設定値になるように設定してください。High設定値がフルスケールよりも小さい値になっていると、それ以上の値を設定できなくなります。
3300F/Gシリーズ デュアルチャンネルの電子負荷で、 両チャンネルを同時にLOAD ONするための機能やリモートコマンドは 実装されていません。
模擬的に同時にLOAD ONにする方法としては、リモートコマンドを使って、
AチャンネルLOAD ON → Bチャンネルに切換え → BチャンネルLOAD ON
とする方法があります。
この場合、AチャンネルがLOAD ONになってからBチャンネルがLOAD ONになるまでに、 コマンド送信とコマンド処理のタイムラグが発生します。
34000×/36000×シリーズ (6)
大容量電子負荷34XXXシリーズでは、機種によりますが100A以上の大きな電流が流れています。
負荷電流をOFFする際はLOADボタンによりLOAD OFFを行って下さい。
本機と供試電源の間にナイフスイッチを実装している場合に、電流が流れている状態でナイフスイッチをOFFしますと その瞬間に負荷ケーブルのインダクタンス成分により高電圧が発生します。
この高電圧が仕様の電圧値を越える可能性があり故障の原因となります。OFFの際は負荷電流を小さくしてから OFFして下さい。
排気の温度は各モデルとも最大50℃です。
しかしながら排気のワット数は大きいので、設置した場所の換気の規模にご注意下さい。
又、排気の為に消費する電力が大きくAC100Vでは不足する機種もあります。ご確認ください。
以下の画像をご参照ください。
<本体背面下部>
大容量電子負荷34000シリーズにはシーケンス機能が標準で搭載されています。
例えば、以下の様な電流ステップ波形で負荷を引くことができます。
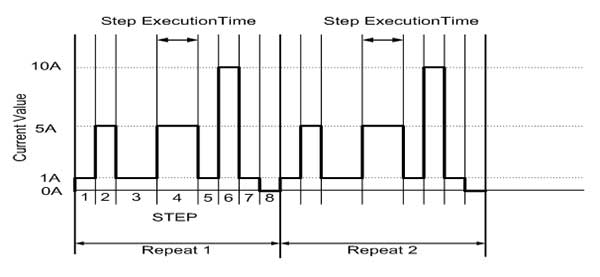
34000シリーズのシーケンス機能では、シーケンスパターンを「ファイル」に記録させます。
「ファイル」は9個まで作成可能なので、9パターンのシーケンスを記憶させることができます。
また、1ファイルあたり16ステップの値を記憶させることができます。
リピート機能により最大9999回まで指定したファイルを繰り返して実行することができます。
■ シーケンス機能の詳細仕様は以下の通りです。
- ファイル作成可能数 9ファイル
- ステップ作成可能数 16ステップ(1ファイル当たり)
- ステップの設定時間最小幅 0.10s
- 1ステップの時間設定可能幅 1ステップ(0.10~9.90s) 2ステップ目以降(0.00~9.90s)
- ステップの設定時間単位 s
- vファイルの最大繰り返し回数 9999回
大容量電子負荷34000シリーズ<の外装板金のカラーコードは「PANTONE クールグレイ 1C」です。
Microsoft Excelに組み込まれたVisual Basic (VBA)により作成したサンプルです。34000シリーズの基本的なコントロールをUSBインターフェースで実現した例となっております。
プログラムの動作など詳しくはファイル内のセル及びVBAのコメントをご覧ください。
また、こちらのサンプルソフトウェアは事前予告なく内容が変更されることがあります。
推奨動作環境
- OS Windows7, 10
- Excel 2007, 2010, 2013, 2016 (ただし、2016は Windows7 での動作は保証せず)
| 接続 | サンプルデータ | 備考 |
|---|---|---|
| GP-IB | PCと接続するためのインターフェースとして、 National Instruments社のGPIB-USB-HS+ が別途必要です。 |
|
| LAN | 環境によってはSocket通信用のOCXを求められますので、 MSWINSCK.OCXをインストールしてください。 | |
| USB | このサンプルにはAutoSequence機能を追加しています。 |
3300Gシリーズ/3340Gシリーズ (2)
3300F/Gシリーズ デュアルチャンネルの電子負荷で、 両チャンネルを同時にLOAD ONするための機能やリモートコマンドは 実装されていません。
模擬的に同時にLOAD ONにする方法としては、リモートコマンドを使って、
AチャンネルLOAD ON → Bチャンネルに切換え → BチャンネルLOAD ON
とする方法があります。
この場合、AチャンネルがLOAD ONになってからBチャンネルがLOAD ONになるまでに、 コマンド送信とコマンド処理のタイムラグが発生します。
基本的にはCVモードの動作の応答が大きな違いとなります。
カタログスペックでCVモードの応答をを明記してあることはあまりありません。
対応負荷でも実機接続して確認していただくことをお勧めします。
LEDドライバは通常定電流出力で動作するため、負荷側としてはCVモードで動作させます。
LEDドライバ対応電子負荷のCVモード
- LEDを模擬するため、基本的にはCV+CRとなる
つまりCV値以上の電圧が印加されると、CR値の抵抗値で動作する - CV+CRモードの動作が高速
CV->CRへの移行、CR->CVへの移行が高速になっている
普通の電子負荷のCVモード
- CV動作時は、インピーダンスが低い
- CVモードの動作が低速
LEDドライバの負荷としては低速で、電流の立ち上がり時に電圧のオーバーシュートが発生する場合が多い
LEシリーズ (5)
チャンネル数の上限はありません。
反応時間は条件によりますが数uS程度となります。
詳しくはこちらのマニュアルを参照ください。
1Chあたり、過電流リミット(3A)以上の電流は流れないようになっています。
電流容量を稼ぐ方法として、各Ch並列接続や、M/S拡張接続が可能です。
ご使用方法など詳しくはこちらのマニュアル(21ページ)を参照ください。
3.2A程度以上には流れないように定電流的な動作となります。
通常は電源側のOVPで停止ということになります。
実際のLEDを使用した場合、立ち上がり電流の傾斜は100usくらいです。
電子負荷を使用した場合、過電流保護機能が動作するため、過電流が流れてしまうことはなく、ダメージはありません。
負荷がOPENというわけではありませんが、3.2A程度以上に流れないように定電流的な動作となります。
この動作は、数10usec以内に動作します。
因って、通常であれば電源側のOVPで停止ということになります。
Ene-phantシリーズ (32)
NT-AA-10KEを3台マスター/スレーブ接続にて三相3線で稼働させる際、負荷が取れないとなった場合は、まずは以下の項目をご確認ください。
- 配線は正しく接続されているか
- マスター/スレーブケーブルは正しく接続されているか。(IN-OUT)
- 3台共にレンジは共通になっているか
- マスター機の設定は適切か。(PARALLEL ON)
- マスター機に対する負荷の結線方式の設定は適切か。(CABLE-CONNECT 3P3W:三相3線)
- CC、CV、CP等の設定のリミットが、接続する供試物の値を下回っていないか
- エマージェンシーが押されていないか(エマージェンシーボタンが押された後は、エラー情報が保持されておりますので、再起動が必要となります)
エラーランプ(赤)が点灯している場合は、エラーコードをご確認いただきサポートまでご連絡をお願いいたします。
LANで制御するサンプルコードです。
使用するにあたり、ocxファイルの登録が必要になります。
詳細は添付のPDFをご覧ください。
レンジ自動切換えは現在対応していません。
配線指示にしたがった手動のみとなっています。
リモコン1台で複数台を同時に制御することはできません。
基本1台のみの制御となります。
系統側の電流・電圧を測定します。
Ene-phantシリーズの筐体は、重量物に耐えられる構造になっておりません。
物を載せると筐体のゆがみや変形により、内部の機器に影響を与える場合がありますので、筐体の上に物を載せないようにしてください。
- 交直両用の負荷機能があります。
- 回生機能があります。
- 遅れ・進み電流位相及びクレストファクタなどの機能があります。
- AC/DC で使用できる負荷モードは異なりますが CC/CV/CR/CP などの多彩な負荷モードがあります。
- 回生型負荷としては kW あたりの価格がリニアタイプと比較しても安価です。
- 200/400V 系の交流電圧に対応できます。
- 最大回生効率は制御損も含んでも 90% 以上と高効率です。
Ene-phant(NT-AA)シリーズには、オプションを含めてアイボルトの追加は出来ません。
これは、機構の設計上の制限の為、特注などを含めて対応することは出来ません。
負荷電圧および電流をアナログ絶縁し、オシロなどで波形モニタリングするためのものです。
50/60Hz地域に関わらず、系統保護設定はデフォルト設定のままでNT-AAを起動動作させることができます。
基本的には、電力協議などで指定された設定値にして運用しますが、デフォルトのままで動作することができるような設定になっています。
矩形波には対応していません。
正弦波出力用の負荷装置となります。
将来的には対応を検討しています。
LANでのコマンド操作の場合、取説に記載された指定のコマンドの先頭に「L」をつける必要があります。
入力されたコマンドをご確認ください。
内部での演算上、ロータリーエンコーダではCRモードに対して 細かい値が設定できないようになっています。細かい値を設定する際は コマンドによる入力やリモコンでの入力をお勧めします。
以下の2点を行なって下さい。
- ボタン電池を新しい物と交換してください。
- OLED2画面の5ページ目「REMOTE-CTLR」が「OFF」になっているか確認してください。
(本機能を「ON」にするとリモコンの入力が無効になります)
DIDOインターフェースでDI信号入力の有効/無効の選択を有効にしてください。
DIDOインターフェイスでAI信号入力の有効/無効の選択を有効にしてください。
本体の非常停止スイッチが押された状態のままでないかご確認ください。
トランスを使用して、電圧範囲を合わせる方法があります。
このときトランスは絶縁型である必要はなく、単巻型で問題ありません。
使用できません。
挙動は以下のようになります。
コネクタを活線状態(Ene-phantで電流を流した状態)からコネクタを抜くと Ene-phantには電流が流れません。そのため電流を流そうと高電圧が発生し、 その電圧を検出してアラーム停止してしまいます。
コネクタを抜いた状態では、Ene-phantは電圧がかかっていないために 負荷をONの状態にすることができません。
抵抗負荷は、瞬時電圧に対しても抵抗として振舞います。
回生負荷装置は、スイッチング技術を応用して負荷電流を制御しています。
CRモードが抵抗負荷に該当するのですが、制御を行っているため制御遅れが生じ、 交流電圧においては位相ズレが生じます(電流が遅れます)。
似たような事象ですが、
抵抗負荷とリアクトルの組み合わせでは、抵抗は振動抑制として働きますが
回生負荷とリアクトルの組み合わせでは、振動抑制が遅くなります。
回生負荷装置は、電圧が低くなるとアラーム停止してしまいますので、 低い電圧まで負荷装置としては働きません。
見積もり時点で、電気方式(単相2線、単相3線、三相)、電圧についてお問い合わせください。
対応可能な場合があります。
電気方式の変更は、困難です。
電圧の違いは、トランスにて電圧調整をお願いいたします。
このときトランスでの絶縁は必要ありませんので、単巻トランスで安価に対応できるかと思います。
回生された電力は、NT-AAが接続されているポイントのすぐ近くの装置で消費され、 そこで消費されない分は、次の近くの装置で消費されます。
上位側からみると消費電力が下がっているように見えます。
電力を再利用できるように電力変換を行うことです。
Ene-phantシリーズは、電力を発生する装置(バッテリ、電源装置etc)から電力を受け取り(負荷を引くということもあります)、 その電力を電力変換を行って再利用できるよう商用系統に注入しています。
よく耳にする回生ブレーキですが、 電気自動車やハイブリッド車は、ブレーキ時にモーターから出力される電力を 電力変換を行って再利用できるようバッテリに充電します。 また、電車などの場合は、架線に注入して他の電車が電力を利用できるようにしています。
電流の位相を設定してから、その位相になるまでに 数secかけて位相が変化するようになっており、 位相急変はできません。
負荷側をショートするモードはないためできません。
電圧が低くなると、UVPアラームを発して動作を停止します。
以下の確認をお願い致します。
- マスター/スレーブの接続が取扱説明書の指示通りになっているか確認してください。また、弊社より販売されている接続ケーブル以外のケーブルを使用している場合、正しく認識ない恐れがあります。
- 系統や負荷側の配線(High/Lowレンジ等)が、マスター機とスレーブ機で一致しているか確認してください。
- マスター機より「PARALLEL ON」を設定、スレーブ機に「Slave」の表示が出ているかを確認してください。
- マスター機とスレーブ機全数でアラームが発生していない事を確認してください。
並列運転時の外部通信は、インターフェースの種類により動作、仕様が異なります。
下記をご参照ください。
- LAN/USB/RS232C
→ 使用可能です。ただし、マスター機からの操作のみとなります。スレーブ機での通信は行えません。 - AI/DIDO
→ 使用できません。単体時のみの使用となります。
以下の事に注意が必要です。
- 並列運転時には単体運転時を大きく上回る電流が流れます。容量にあった線径のケーブルをご使用頂くようお願い致します。容量を超えるケーブルにて長時間使用し続けると、場合によっては発煙・発火の恐れがあります。
- 並列運転時にはマスター機からの操作をお願いします。スレーブ機からの操作は行えません。(非常停止を除く)
- 並列運転時にはマスター機の電流、電力の測定値は並列接続した全数の合算値が表示され、スレーブ機には各機の測定値が表示されます。
以下をご確認ください。
- クロスケーブルを使用しているかどうか
- 取扱説明書でNCとなっているピンがその通りになっているかどうか
- 5ピンが正しく接地されているかどうか
Ene-phant(NT-AA-10KE-L)は、LowレンジでDC70V以上、AC50V以上が動作範囲となりますので50V以下の機器には対応できません。
Ene-phant(NT-AA)シリーズは交流にも対応できるため、一見、直流機器の極性をどちらに接続しても良さそうに見えますが、接続には極性があり、逆に接続した場合は逆接続アラームが発生します。
端子台に極性が記されていますので、注意して接続してください。
負荷電流を引くことに重点を置いた負荷モードで、工場出荷オプションとなります。
ACにおいて
- 電圧波形歪が大きい
- 供試物の出力インピーダンスが高い
などの場合に、通常のCC,CRモードでは電流を引くことができない場合があります。
例として、発電機などです。
このため 負荷モードCC、CRの確度はある程度とし、負荷電流を引くことに重点を置いた負荷モードとなります。
これは工場出荷オプションとなります。
NTシリーズ (12)
NT-DD-2000Aは入力Off状態(充電、放電動作させていない状態)、 他のNTシリーズと測定系の構成が異なり 内部動作電圧が表示されます。 入力側は約24V程度、HVDC側は約14V程度となりますが、 故障ではありません。
以下の制限はありますが可能です。
基本的に、1台のNT-ADは自立運転モード、もう1台は系統連系モードで動作させます。
融通する電力のコントロールは、系統連系側で行います。これは、通常の系統連系のイメージと同じになります。
系統連系モードで動作させている側からの電力を自立運転側が吸い込み吐き出しする形となります。
起動手順は、自立運転側を先に起動し、次に系統連系側を起動します。
大きなコモンモードが発生するため、絶縁トランスの挿入や本体の対策も必要となる場合がありますので、詳しくはご相談ください。
50/60Hz地域に関わらず、系統保護設定はデフォルト設定のままでNT-ADを起動動作させることができます。
基本的には電力協議などで指定された設定値にして運用しますが、デフォルトのままで動作することができるような設定になっています。
NT-Series のコントローラ NT-SC の CAN I/F に接続出来る NT-Series の電源ユニットは、最大で 12台までとなります。ただし、各電源ユニットの並列運転は、最大 10台 (2kW × 10台) 20kW までとなります。
NT-LD-2000E の並列運転に関しては、別途 NX-OP10(NT-LD 並列運転オプション)が NT-LD の台数分必要となります。
NT-AD-2000 の並列運転に関しては、、自立運転の並列運転を行わないのであれば、特にオプション指定など無く並列運転が行えまが、自立運転の並列運転を行う場合は、別途 NX-OP09(NT-AD 並列運転オプション)が NT-AD の台数分必要となります。NT-DD-2000x に関しては、特にオプション指定など無く並列運転が行えます。
また、NT-Series の並列運転に関しては、NT-AD-2000 は非絶縁の電源ユニットとなっていますので、別途、絶縁トランスなどを準備頂く場合があります。
NT-Seriesの匡体は、重量物に耐えられる構造になっておりません。
物を載せると匡体のゆがみや変形により、内部の機器に影響を与える場合がありますので、匡体の上に物を載せないようにしてください。
縦に積み重ねたい場合は、NT-Seriesの匡体に重量が加わらないよう、ラックに組み込んでご使用頂くことをお勧めします。
NT-SC取扱説明書の最新版(Rev1.3版)のP.49に簡単なサンプルプログラムが記載されています。
NT-COREベーシック版とUSBでのVisualBasicの制御は並行して行うことができません。
通信で非常停止状態を解除することはできません。
非常停止ボタンを手で引っ張り、非常停止状態を解除してください。
ホストPCとNTシリーズを直接CANで接続して制御することはできません。
NTシリーズをCANで制御するときは、NT-SCを介してPCと接続します。
また、CAN用コマンドも非公開となっています。
可能です。PC を含めた環境にも依存しますが、測定間隔の最小値はおおよそ100ms程度です。
ステップ注入付周波数フィードバック方式は対応しておりません。
NT-DD-2000Aは入力Off状態(充電、放電動作させていない状態)、 他のNTシリーズと測定系の構成が異なり 内部動作電圧が表示されます。 入力側は約24V程度、HVDC側は約14V程度となりますが、 故障ではありません。
MCDシリーズ (7)
センス部の入力インピーダンスは 2MΩとなっており、5V 動作時では 2.5uA が設計上の値となります。
MCD-05 のハードウェア・シーケンス機能とは、1コマンド約 100msec 程度の USB I/F を使用した通信制御では実現出来ない、高速な設定と測定の制御を実現する機能です。MCD-05 内部に高速設定動作と高速測定動作を実現させるために、ハードウェアのメモリを実装しています。コマンド設定用メモリとして 2048個、測定データ保存メモリとして 2048個のバッファを持っています。設定動作としては、最短で 2μsec 間隔で設定動作を行う事が出来ます。測定動作としては、最短で 3msec 間隔で測定動作が行えます。
MCD-05 でブロードキャスト(ch 指定 “0”)でコマンドを実行した場合、設定は同期して行われますが、隣接 ch 間で約 200nsec 隣接ユニット間で約 2usec の設定遅延が発生します。
MCD用HydrangeaにはWaveFormGeneratorというツールが組み込まれています。このツールはMCDのハードウェアシーケンス機能というものを利用して特定の波形を生成して出力させることができます。
- 動作原理
MCDのハードウェアシーケンス機能というものを利用した機能です。出力したい波形を指定された時間分解能で細分化し、ハードウェアシーケンスのステップ情報を生成します。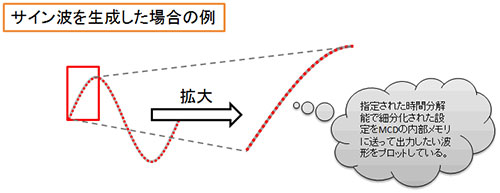
- できること
サイン波、三角波、方形波を生成することができます。また、波形のP-P値、波形のセンター値、周波数、開始位相、生成分解能、波形を連続して出すかの設定が可能です。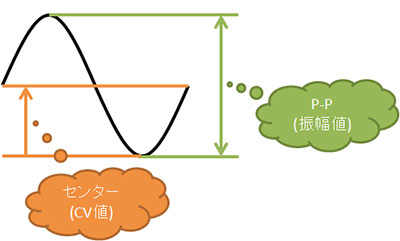
方形波に関してはスルーレートの可変が可能です。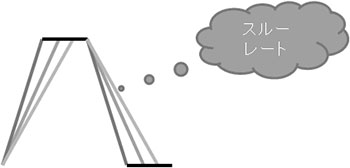
可変できる設定の対象は電圧のみです。複数の波形エディタの開始同期をさせることが可能です。
- ポイント
指定した時間分解能で細分化してプロットしているため、生成分解能が周期に対して少ない(生成ポイント数が少ない)場合は波形が荒くなります(目安としては500ポイント以上だとオシロスコープの目測できれいに見える感じです)。
あくまでもプロットしているだけなので純粋なファンクションジェネレータと比べると歪率が大きくなる場合があります(ポイント数が少ない場合等)。
WaveFormGeneratorでプロットできるポイント数(ハードウェアシーケンスのステップ数)は最大で2000ポイントで1ステップの実行時間(間隔)が最速で2usecとなる為設定できる周波数と生成分解能の組み合わせには限界があります。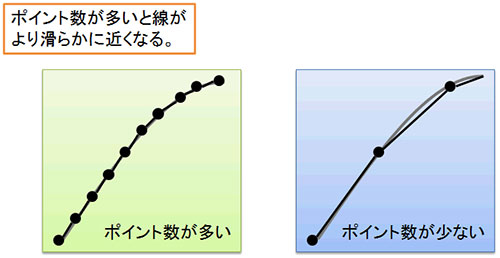
負荷条件によっては所望する波形にならない場合があります(たとえば供試体の容量成分が大きい場合波形がなまるなど)。
- 使用方法
●電源部設定
→CV値:出力波形のセンター値となります。
→CC値:出力電流値となります。
●負荷部設定
→CC値:負荷電流値となります。
※MCDのCV値は負荷部と電源部共用となります。
※負荷部のCC値を設定しない場合、相手の負荷によっては所望する波形が得られない場合があります。負荷部側のCCも設定することをお勧めします。
●重畳波形の種類
→生成する波形の種類を指定します。
●重畳波形の設定
→周波数値:出力周波数を設定します
→振幅値:出力する波形のP-P値を設定します。出力可能な範囲を超えた場合は、定格でクリップします。
→スルーレート値:方形波の場合に有効になります。立ち上がり、立下りのスルーレートを設定します。
→開始位相値:開始位相の設定をします。
●生成条件
→ワンショット・ループ:一回のみか、連続して出力し続けるかを選択します。
→生成分解能値:生成分解能を設定します。単位はマイクロ・ミリ秒の選択が可能で、最速で2マイクロSecが選択可能です。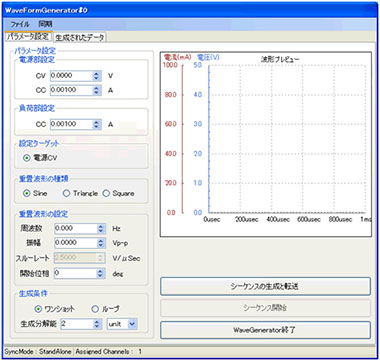
以下、Windows 7での説明となります。
(WinUSBドライバーは現在検証中のデジタル署名付き64Bit対応版となるため、現状添付しているものとは若干表示が異なります。)
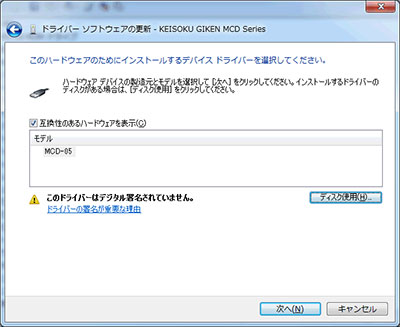
- デバイスマネージャーのMCDの項目にてドライバーソフトウェアの更新をクリックします。
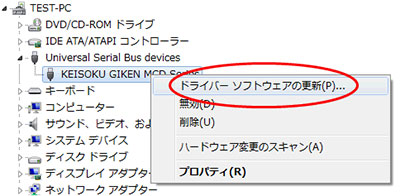
- コンピューターを参照してドライバーソフトウェアを検索しますをクリックします。
- コンピューター上のデバイスドライバーの一覧から選択しますをクリックします。
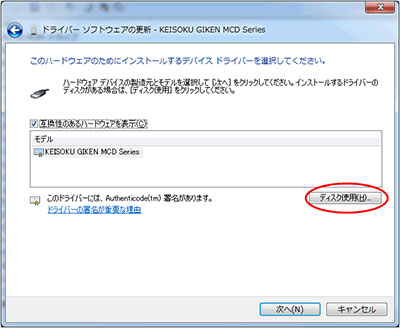
- ディスク使用をクリックします。
- MCDサポートCDの”Driver\DrvMCD_NI-VISA(Vista)”を選択してOKをクリックします。
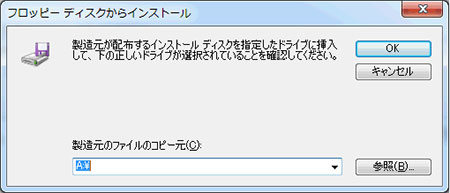
- 次へをクリックします。
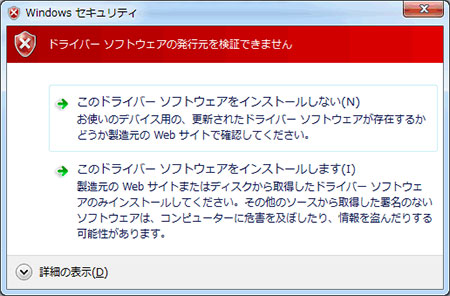
- このドライバーソフトウェアをインストールしますをクリックします。
- 閉じるをクリックします。
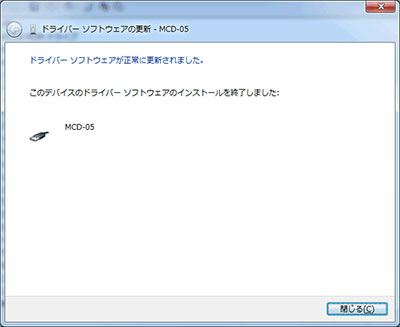
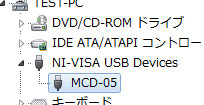
- ドライバーが正しく適用されると以下のように表示されます。
MCDという製品は、”電子負荷と可変電源がそれぞれのチャンネルに入っている装置”です。(単なる電源ではありません。)
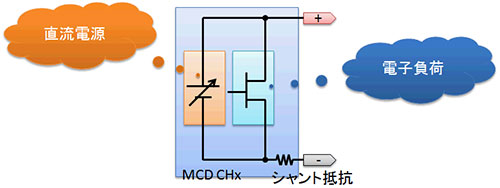
MCDという製品の特長的な動作として、
- 設定したCV値よりも供試体の電圧が高い場合、設定した負荷電流値で電流を引こうとする(シンク動作)
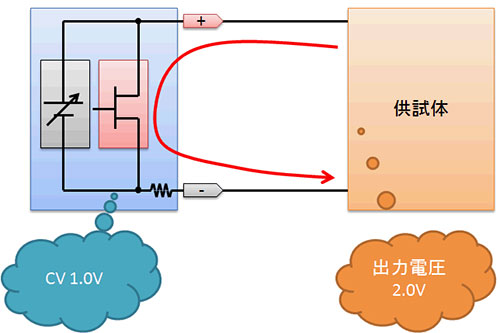
- 設定したCV値よりも供試体の電圧が低い場合、設定した電源電流値で電流を流そうとする(ソース動作)
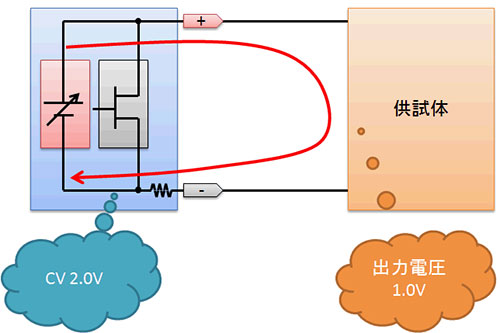
が挙げられます。
電源部と負荷部のCV制御は共通の制御部を使用しているため、MCD端子間電圧の状況に応じて電流の出し入れがシームレスに行われるようになっています。
電源部と負荷部を協調動作させることで目的とする電圧になるように制御をかけます。(供試体が容量成分の大きいものである場合は、容量成分が大きいほどそのスピードは当然落ちます)
純抵抗、又はカットオフがあまり低くないローパスの様なものを接続する場合は、電源部と負荷部の電流値を必ず設定して利用してください。(電流値を設定しないと回路が動作しない仕組みになっています)
MCDシリーズのCV応答を改善する為に設けている設定項目となります。
一般的な電源は負荷抵抗がついているので多少CVがオーバーシュート気味になったとしても負荷抵抗で消費する分収束する時間が短くなります。(電源のCV応答に依存はします。)
MCDの場合はその負荷抵抗はなくその代わりに代用できるのが負荷部となります。
電源部と負荷部が協調動作をすることで目標とするCV値へ収束させる速度が改善します。
(負荷部がまったく動いていないと対象がCの場合設定より電圧が高くなる場合があります。)
各部の電流値を0にすると動作しなくなるので協調動作による応答改善を行う場合は微小でも電流値を設定することをお勧めします。
信号発生器 (7)
入力されたアナログ信号を標本化したデジタル信号にFFT(高速フーリエ変換)処理し、周波数ドメインで表示することにより波形に含まれる周波数成分の解析ができる機能となります。
こちらの高速フーリエ変換 FFTとは?も併せてご覧ください。
基本問題ありませんが、AC電圧+DC電圧の信号ピークが各レンジの最大入力電圧を超えない範囲で使用して下さい。
標準仕様は-20dBµV〜126dBµV(EMF)となりますが、高出力オプションをつけることで-20dBµV〜132dBµV(EMF)までとなります。
MAS-8421はSGの内部変調周波数がプログラマブルな設定が可能になっていますが、MAS-8420は固定周波数の選択式となっています。
デジタル方式でアナログ波形を生成致します。
MAS-8421/8420では内部に実装されています。
合わせて読みたい
接続可能なモニタの基本条件は以下のようになっております。
- HDMI 1.4a
- 解像度
1920×1080 @30Hz / 1920×1080 @24Hz / 1324×768 @60Hz / 1280×1024 @60Hz / 1280×800 @60Hz / 1280×768 @60Hz / 1280×720 @60Hz / 1152×864 @75Hz / 1024×768 @76Hz / 1024×758 @60Hz
※この条件を満たすモニタでも正常に動作しない場合がございます。事前確認をお勧めいたします。
現在このシリーズは大きく分けて「オーディオアナライザ」と「信号発生器」の2タイプがございます。
それぞれの製品につきましては下記をご参照ください。
オーディオアナライザ (9)
入力されたアナログ信号を標本化したデジタル信号にFFT(高速フーリエ変換)処理し、周波数ドメインで表示することにより波形に含まれる周波数成分の解析ができる機能となります。
こちらの高速フーリエ変換 FFTとは?も併せてご覧ください。
カスタム対応は可能です。こちらよりお気軽にご相談ください。
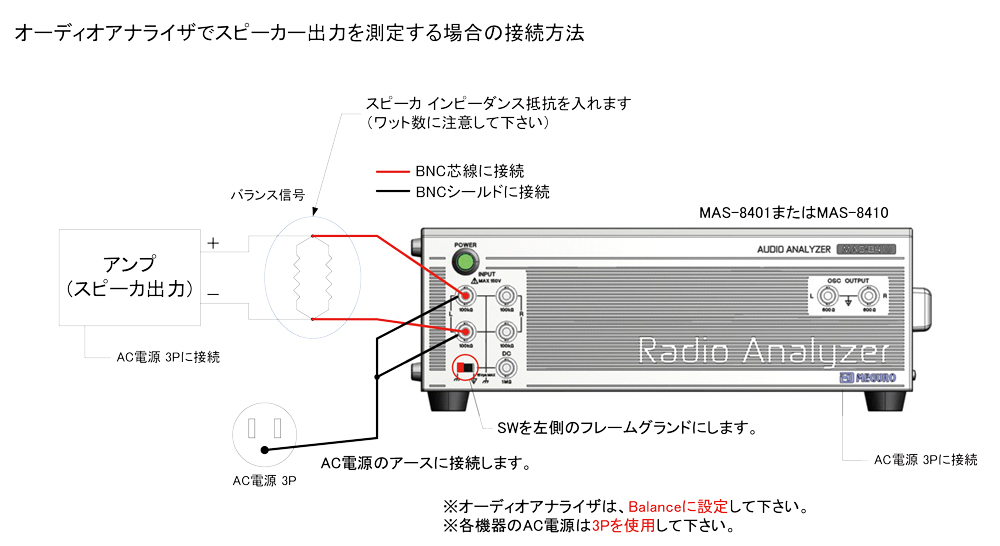
平衡出力はできません。
アンプに接続する場合は下図のようになります。
同時測定には対応しておりません。切替式2chとなります。
MAS-8400OSCはオーディオアナライザーとAM/FM標準信号発生器が標準装備されています。
MAS-8410OSCはオーディオアナライザーのみの搭載となります。
接続可能なモニタの基本条件は以下のようになっております。
- HDMI 1.4a
- 解像度
1920×1080 @30Hz / 1920×1080 @24Hz / 1324×768 @60Hz / 1280×1024 @60Hz / 1280×800 @60Hz / 1280×768 @60Hz / 1280×720 @60Hz / 1152×864 @75Hz / 1024×768 @76Hz / 1024×758 @60Hz
※この条件を満たすモニタでも正常に動作しない場合がございます。事前確認をお勧めいたします。
MAS-8401はSGの内部変調周波数がプログラマブルな設定が可能になっていますが、MAS-8400は固定周波数の選択式となっています。
現在このシリーズは大きく分けて「オーディオアナライザ」と「信号発生器」の2タイプがございます。
それぞれの製品につきましては下記をご参照ください。
GNSS信号発生器/記録・再生器 (20)
バッテリー自体の温度は測れないので、LabSat3の使用環境温度が目安となります。
使用年数:500回の充放電が目安となります。
バッテリーを入れたまま、AC電源に長時間繋ぐと、バッテリーの過充電が起き、
膨張につながりますので、ご注意ください。
| 周波数帯 | 衛星の種類 |
| 1575.42MHz | GPS L1, Galileo E1, QZSS, SBAS |
| 1602MHz | GLONASS L1 |
| 1561.098 | BeiDou B1 |
回数の制限はありません。
連続してRF出力することは可能です。ループでの再生設定も可能です。
目安として10分で2.4GBとなります。使用されるメディアの記録容量で大体の算出が可能となります。
LabSat3は9.66MHz、LabSat3Widebandは10MHz、30MHz、56MHzの中から選択出来ます。(量子化ビット数1~3はチャネル数と帯域幅に依って決定します。)
LabSat3はL1信号で、4つのGNSS衛星(GPS,GLONASS,BeiDou,Galileo)から選択して記録・再生が可能です。
衛星信号の記録は、最大3チャンネル(3衛星記録)まで可能です。
モデルはシングル(1ch)、デュアル(2ch)、トリプル(3ch)の3種類があります。
付属で「LEMO 2 WAY TO 12V CIGAR LIGHTER LEAD – 2M」のケーブルがありますので、そちらの活用をお勧め致します。
約2時間となります。
SD カード、HDDで記録可能です
バッテリー駆動とACアダプターでの駆動が可能です。可搬性に優れた製品となります。
*給電はバッテリーが優先して行われる為、室内等でご使用の際はバッテリーを外して、ACアダプターで運用をお願いいたします。
英国 Racelogic が開発をした、GNSS信号を記録/再生することの出来る測位可能なレコーダーシステムです。
大丈夫です。
MSG-2060は、出力に耐圧50VのDCカッターを内蔵しています。
MSG-2060の信号で測位は行えません。測位が必要な場合はLabsat3をお勧めします。
Labsat3は、実際の衛星信号を記録/再生する機器になります。記録した信号を再生するため受信機は測位を行うことが出来るので受信機の動作確認に適しています。
MSG-2060は衛星1基分の信号しか出力できませんが、高精度で安定した信号を出力できるので、受信モジュールのCN感度調整、評価に適しています。
出力レベル範囲と回路の構成が異なります。
MSG-2060は信号を合波後にアッテネータを装備しており、2種類の信号レベルは同時に可変します。
MSG-2060ATTは発信器ごとにアッテネータを装備しており、2種類の信号レベルを独立して可変できます。


GPS、GLONASS、BeiDou(北斗)※1、QZSS(みちびき)、IMESの信号に対応しています。
上記の中から2種類の信号を選択して同時に出力できます。
※1BeiDou(北斗)はオプション
接続可能なモニタの基本条件は以下のようになっております。
- HDMI 1.4a
- 解像度
1920×1080 @30Hz / 1920×1080 @24Hz / 1324×768 @60Hz / 1280×1024 @60Hz / 1280×800 @60Hz / 1280×768 @60Hz / 1280×720 @60Hz / 1152×864 @75Hz / 1024×768 @76Hz / 1024×758 @60Hz
※この条件を満たすモニタでも正常に動作しない場合がございます。事前確認をお勧めいたします。
7700(旧7470)シリーズ (21)
安全試験器 7470シリーズの連続印可オプションは、ご購入後でも弊社にセンドバックすることによって後から追加することも可能ですが、ご購入時期が2014年11月以前の場合、追加できない可能性があります。
連続印可オプションの追加をご検討されている場合は、弊社までご連絡ください。
各機能については、以下のシリーズにて流用が可能です。
詳細は添付の相関表ならびに各シリーズの取扱説明書をご覧ください。
出力
- PASS: 7470, ESA-A, EST, SE, ESD, 7300, 7630
- FAIL: 7470, ESA-A, EST, SE, ESD, 7300, 7630
- PROCESSING: 7470, ESA-A, EST, SE, ESD, 7300, 7630
- RESET OUT: EST, ESD, 7300, 7630
- START OUT: (ESD), (7300), (7630)
※ START OUT機能について、6, 7ピンを共通COMMONとすれば、上記いずれのシリーズでも流用可能です。
入力
- TEST: 7470, ESA-A, EST, SE, ESD, 7300, 7630
- RESET: 7470, ESA-A, EST, SE, ESD, 7300, 7630
- INTERLOCK: 7470, ESA-A, EST, SE, ESD, 7300, 7630
- Memory: (7470), ESA-A, EST, SE, (ESD), (7300), 7630
- W-P: ESD, 7300
※ 各シリーズによって設定可能なメモリ数が異なる為、注意が必要です。
※ 5, 7ピンを共通COMMONとすれば、ESA-A,7630シリーズの各機能は流用可能です。
安全試験機 747XシリーズでGPIB通信を使って制御を行う場合、コマンドを送ってから次のコマンドを送る時間(コマンドインターバル)は約200ms程度の間隔を設けるようにしてください。
コマンドインターバルが200ms以下の場合、連続的にコマンドを送信するとコマンドエラーが発生する可能性があります。
安全試験器 747Xシリーズで「OUTPUT ERROR」または「FATAL ERROR」が発生した場合、イベントレジスタのビット3(Device Error)が1となります。
イベントレジスタは「*ESR?」コマンドで取得することができます。
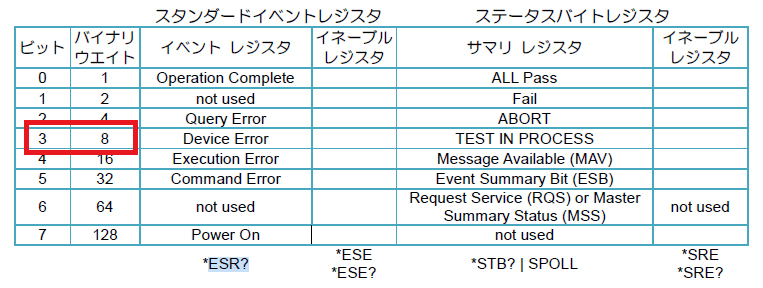
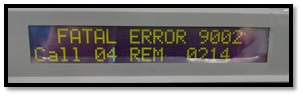
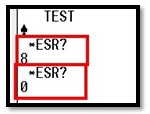
※*ESR?コマンドでデータを取得すると、イベントレジスタの値はクリアされます。
- トランスの使用はあるか?
→本製品のAC入力および高電圧出力それぞれにトランスを使用しています。 - トランスの使用がある場合、絶縁トランスか?絶縁トランスでない場合、ノイズの影響は許容できる範囲内か?
→入出力ともに絶縁トランスです。 - トランスの1次側と2次側の両方に、過電流保護器(サーキットブレーカ、サーキットプロテクタなど)を設置しているか?
→[出力側] 過電流保護器は設置していません。 検出回路とファームウェアで過電流を検知し、出力自体を停止します。
→[入力側] 入力トランスの1次側にヒューズが付いています。
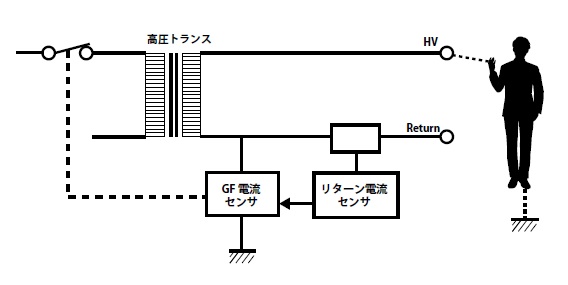
近年では電子機器により高い安全性が求められており、工場から出荷される前に何らかの安全試験に合格しなければなりません。最も一般的な安全試験は耐電圧試験で、試験電圧は5kVなどの高圧となります。工場の繁忙期には作業者の不注意などにより作業者が高電圧に触れることも考えられます。そのような場合、作業者に重大なダメージを与え、場合によっては生命に関わる危険もあります。弊社の安全試験器はこのような危険から作業者を保護するため、スマートGFIという機能を持っています。試験中に被試験物のアースからグラウンドに対して余分な電流が450μA以上流れるとスマートGFI回路がこれを検出し、作業者の安全確保のために速やかに高圧を遮断します。
メモリ間で一度出力がOFFしてしまいますが、メモリ機能を使用する事で連続して試験する事は可能です。
メモリは50個有り、それぞれに以下の設定ができるようになっています。
Voltage ・・・ 設定電圧
Ramp-Up Time ・・・ 出力OFFから設定電圧になるまでの時間
Dwell Time ・・・ 設定電圧を印加する時間
Ramp-Down Time ・・・ 設定電圧から出力OFFするまでの時間
Connect ・・・ 試験終了後、次のメモリを自動的に実行する。
(一部省略)
Connect設定を”ON”にする事で、連続的に試験が可能になります。
階段状に電圧を設定(出力をOFFせず、次の設定電圧を印加)するような試験が必要な場合、オプションにより対応することができます。詳しくは弊社営業部までお問い合わせ下さい。
超高圧試験器 7473 / 7474とも、以下の方法で各種設定を”工場出荷状態”に戻すことが出来ます。
※初期設定状態にすると、現在メモリーに記憶されている各種パラメータもリセットされてしまいますのでご注意下さい。
方法:
ここでは例として、7474を”工場出荷状態”にしてみます。7473も同じ動作となります。
- フロントパネル左側の電源スイッチを”OFF”にします。
- フロントパネル右側にある10キーの”1″と”0″を押下たまま、電源スイッチを”ON”にします。
- 表示パネルに下記のような表示がされます。
Set Defaults?
SETUP=Yes EXIT=No - リセット実行であれば”SETUP”キーを押します。キャンセルであれば、”EXIT”キーを押します。
- リセット実行すると表示パネルが再起動し下記のような表示がされます。
EXTECH
Model:7474 Ver:1.14
Verについては納入時期により異なります。 - その後、通常画面に戻り、リセット動作は完了します。
「PLC REMOTE」の設定をご確認ください。SYSTEMキーを押す事でご確認頂けます。
これがONとなっている場合は、製品の後面にある「SIGNAL INPUT」で試験の開始・停止を制御する動作となります。
前面のTESTボタンは無効となります。
これをOFFとする事で、前面のTESTボタンを使用する事が可能になります。
- 電子負荷の電源がOFFになっていることを確認します。
- フロントパネルのテンキーの0キーと1キーを押しながら電源を投入します。
- 747xシリーズは Load Defaults? と表示され Yesキーを押すと再起動します。
初期化を行うとすべての設定情報が消去されます。 GPIBカード等が挿入されている場合、アドレスも初期化され8番になります。
7470シリーズは、PLCリモート制御とリモートコマンド制御を同時に使うことができます。
例えばPLCリモートで試験を開始した後、リモートコマンドの「TD?」で安全試験器の測定値をPCなどに取り込むことができます。
※PLCリモート制御を使うときは、安全試験器のPLCリモートの設定をONにしておく必要があります。
※リモートコマンドを使うには、USB&RS-232CインターフェースオプションやGPIBインタフェースをオプションとして追加して いただく必要があります。
出張校正は対応しておりません。機器を送付して頂き、弊社内での校正となります。
校正に関する詳細は、こちらの専用ページをご覧ください。
校正周期についてはユーザー様で決定して頂いております。
半年周期から2年周期など様々ですが、1年周期とされているユーザー様が多いです。
交流電源 安全試験器の全ての製品において、PCB(Poly Chlorinated Biphenyl)が含まれている部品は使われていません。
従って、PCBは含まれていません。
クランプコア(LC-120)はRoHSに対応しています。
※RoHS…電子・電気電子機器に含まれる特定有害物質の使用制限に関する指令です。
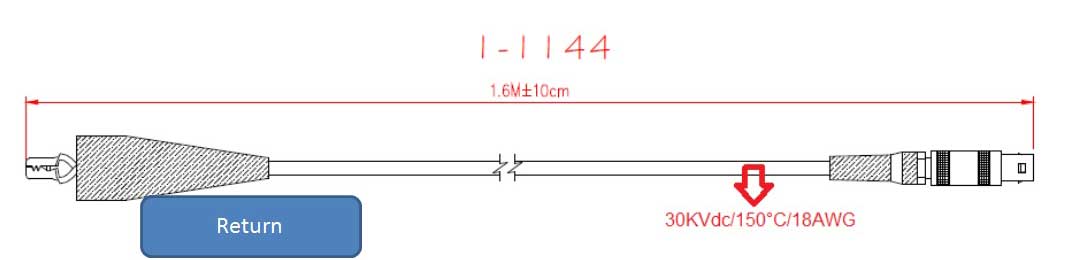
標準添付されているテストケーブルの型名と詳細(ケーブル太さ・長さ)は以下の通りです。
- High Volt 型名:1142
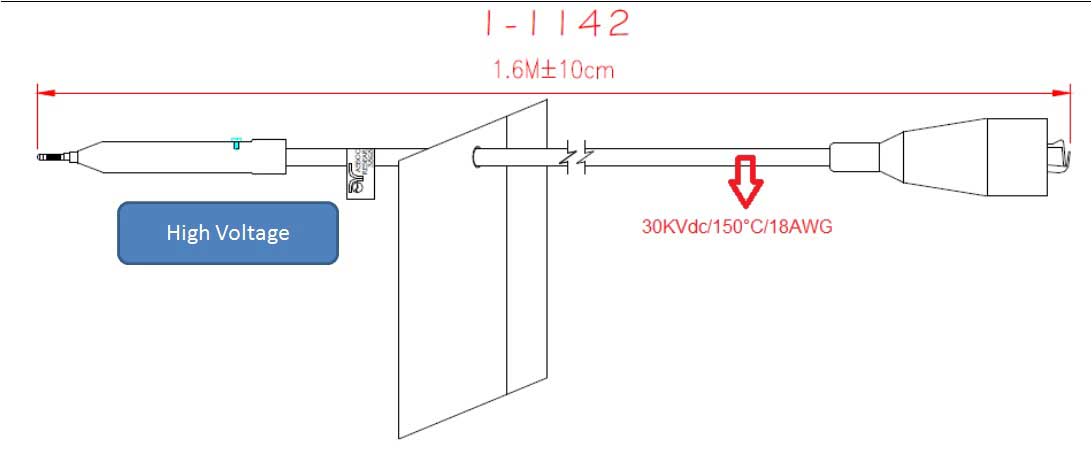
- Return 型名:1144

Ramp-HiとはRamp-Up時間の間、電流上限設定値を無視する機能です。機種によってはRamp-HiをON,OFFだけでなく、電流設定することも可能です。
Ramp-Hiによって設定された電流値はRamp-Up時間の間のみ有効な電流上限設定値です。
Ramp-Up時間の間は通常の電流上限設定値は無視されます。
Ramp-Up時間の間にRamp-Hiによって設定された電流値に到達した場合、”Ramp-Hi”というメッセージが表示されます。
治具がGNDアースから電気的に絶縁が確認できているはずなのにGND Faultが表示される場合は、治具又はプローブ線とGNDアース間の浮遊容量による影響が考えられます。
治具やプローブ線は机にたらさず、ガイシなどを使用してGNDアースから完全に浮かして浮遊容量を小さくしてください。
また、Hi側のプローブ線とReturn側のプローブ線は十分に離し、なるべく直線状に配置してください。
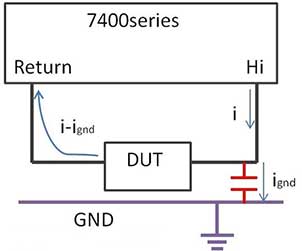
- GND Faultになる漏洩電流(画像:Ignd)のしきい値
7400シリーズ:450μA
SEシリーズ:0.5~5mAの間でプログラム可能
※リターン側の漏洩電流は測定されません。
Charge-Lo機能はテストケーブルがDUTに確実に接続されていることを、試験前に確認する機能です。
容量性DUTの場合、DC耐電圧試験では電圧印加直後に充電電流が流れます。もし、充電電流が設定よりも低い場合は、テストケーブルがDUTに確実に接続されていない可能性があります。
Charge-Lo値(充電電流値)を取得し自動で設定することができます。(Auto Set機能)
Auto Set機能実行時、Ramp-upに大きな値を設定していると十分な電圧が出力されないため、充電電流が検出されないことがあります。
その場合は、Ramp-upを最小値にしてAuto Set機能を実行してください。
安全試験器7474シリーズで「RD?」コマンドなどを送信した時に帰ってくるステータスの種類です。
取得できるステータス
Abort
Pass
LO-Limit
HI-Limit
Short
BreakDown
Arc-Fail
GND-Fault
7470シリーズの本体内部には電池(リチウム電池、ボタン電池など)は使用されていません。
3800(旧EST-300)シリーズ (2)
ESTシリーズでは,電圧・電流の測定に平均値方式(MEAN)を用いています。
SEシリーズでは,実行値方式(True RMS)と平均値方式(MEAN)をメニューから選択することができます。
実行値方式(True RMS)
歪みを含んだ実波形を使ってRMS値を算出します。
平均値方式(MEAN)
波形を歪みのない正弦波として扱い、交流信号の平均値を算出してから実行値に換算します。
安全試験器 ESTシリーズにおいてTD?コマンドで取得できるステータスの種類は以下の通りです。
↓↓
TD? {step, test type, status, meter 1, meter 2, meter 3}
| Pass | 試験に合格 |
| DWELL | 電圧印加中 |
| Discharge | 供試物の放電中 |
| Ramp Up | 出力電圧上昇時 |
| Ramp Down | 出力電圧下降時 |
| Abort | 試験中にRESET ボタンまたはリモートリセットにより強制終了された場合 |
| Hi-Limit | 供試物の測定結果がどのパラメータにおいても上限値設定を超えた場合 |
| Lo-Limit | 供試物の測定結果がどのパラメータにおいても下限値設定に満たない場合 |
| Arc-Fail | AC/DC耐電圧試験でアーク検出が有効(アーク感度 = 1…9)で供試物のアーク電流がアーク感度限界を超えた場合 |
| Short | 供試物への電流がメータの試験レンジを大きく超えた場合 |
| Charge-LO | ランプアップ時漏れ電流がチャージロー設定を下回ったとき場合 |
| Breakdown | 供試物の電流が試験またはアーク感度限度を超えたアーク条件でメータのレンジを大きく超えた場 |
| GND-Fault | 試験中GFI閾値を超えた場合 |
7800(旧SE7400/SE7450)シリーズ (14)
SEシリーズでは試験時間の設定その他で、自動レンジと固定レンジでの仕様値を持っています。
特に短い試験時間を設定する場合は、テストパラメータのレンジ設定を”固定”にしてご利用ください。
レンジを固定にした時は、電圧・電流等のパラメータ設定に従ってレンジが固定されます。
レンジがHigh側に固定の場合は低い測定値域での確度が低下しますのでご留意ください。
例:
AC耐電圧試験時間の仕様は下記ですが、テストパラメータのレンジ:自動で表中上、レンジ:固定で表中下の設定範囲になります。

ESTシリーズでは,電圧・電流の測定に平均値方式(MEAN)を用いています。
SEシリーズでは,実行値方式(True RMS)と平均値方式(MEAN)をメニューから選択することができます。
実行値方式(True RMS)
歪みを含んだ実波形を使ってRMS値を算出します。
平均値方式(MEAN)
波形を歪みのない正弦波として扱い、交流信号の平均値を算出してから実行値に換算します。
安全試験器 SE7430の内蔵スキャナの設定/測定確度は、前面出力端子で試験を実施したときの設定/測定確度と同じとなります。
SE7400シリーズでは、試験時間(Dwellなど)の時間単位を「分」や「時間」に変更することができません。
「秒」単位のみ設定することが可能です。
安全試験器 SE7400シリーズにOpt.7015(6kVAC/7.5kVDC)を追加すると,耐電圧の関係によりOpt.7004の故障を引き起こす可能性があります。
Opt.7015(6kVAC/7.5kVDC)を使ってスキャナ機能を実現するためには,7006にOpt.7032(7kVac/8kVdc Output)を追加する必要があります。
耐電圧試験は製造現場において製品の品質と安全確認のために100%実施を義務づけられています。それらは国家的又は国際的な機関である JSI, CSA, VDE, BSI, IEC, TUV などで制定されています。試験はそれぞれの安全規格によって製品群ごとに定められた高電圧を定められた時間、被試験物に与えることで行われます。
試験のコンセプトは通常の動作電圧に比較して十分高い電圧を印加しても耐えられるならば通常の使用電圧では問題なく機能するだろうというものです。耐電圧試験中に絶縁破壊が発生しなければ耐電圧試験に合格したとみなされます。絶縁破壊は、絶縁物を通じて急激に制御不能な電流が流れることで判断されます。試験を行う者は被試験物とその製品に該当する安全規格に照らして試験電圧を決める必要が有ります。一般的には試験電圧は交流電圧です。万一被試験物の絶縁物に大きなキャパシターが挿入されている場合、直流試験が推奨されています。その場合の直流電圧の値は、交流電圧の1.414倍となります。
アース導通試験はシャーシと被試験物のグラウンドポスト間のインピーダンスを測定することで行われます。このとき、被試験物が万一不良となったときの電流を流すのに十分な安全回路が形成されているかを試験します。一般的には25Aの電流を流し、その時のインピーダンスが0.1Ω以下であることが求められます。CSAへの適合を試験する場合には40Aの電流が要求されます。アース導通試験では、例えばグラウンド配線の直径が不十分である場合や、切断されていること、及び取り付け強度が不十分であるような事象を発見することができます。
このパラメータは,SE7430+Opt.7002またはSE7450+Opt.7002の組み合わせのときに 有効となります。 その他の機種やOpt.7002が入っていない場合は、このパラメータは無視され SE7400シリーズの動作に反映されません。
このパラメータは、導通試験(Cont.Checkとリターンリードの間の接続を確かめる試験)を 実行するかどうかを切り替える(ON/OFF)ためのパラメータです。
Opt.7002(導通試験オプション)が組み込まれていないと,導通試験が実行できないため、 「Continuity」パラメータが無視されるという仕組みです。
この理由のため,ECTコマンド(導通試験編集)も SE7430+Opt.7002またはSE7450+Opt.7002の組み合わせ以外の場合には 無視されます。
SE7400シリーズに搭載されているバーコード機能には4種類の読み取りモードがあります。
- SER/PROD
バーコードで読み込んだ文字列をシリアル番号とプロダクト番号として読み込む。
(シリアル番号とプロダクト番号に別れた別々のバーコードを読むことになります。) - SERIAL#
バーコードで読み込んだ文字列をシリアル番号として読み込む。 - PRODUCT#
バーコードで読み込んだ文字列をプロダクト番号として読み込む。 - RUN FILE
バーコードで読み込んだ文字列に一致したファイル名(テストシーケンス)を呼び出して実行する。
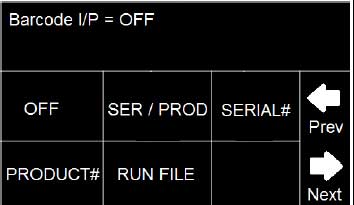
1.~3.までのモードが選択されているとき,TD?コマンドやRD x?コマンドの返却値の中にシリアル番号やプロダクト番号が含まれるようになります。
例:SERIAL#を選択して、バーコードに埋め込まれているシリアル番号が「123456789」の場合

※SERIAL#を選択した場合、プロダクト番号は「0」として追加されます。
RUN FILEモードは、バーコードから読み込んだ文字列で、予めSE7400シリーズに登録していたファイル名を検索し一致したファイル名を実行するという機能となります。
推奨するUSBスキャナは、F680(ブランド名:CINO)となります。
SE7400シリーズは、使用中試験ステップの切替り目でプロンプトが表示され、テストボタンを押さないと試験が先に進まないことがあります。
プロンプトは以下のような画面です。
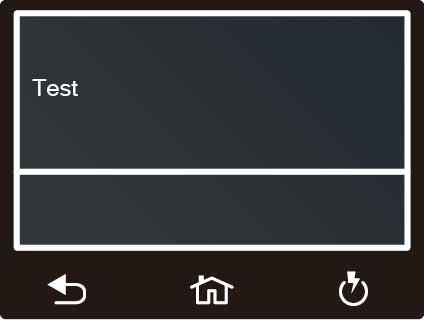
これは試験条件を決めるメニューの中で「Prompt」の項目に文字列を指定していると発生します。
(試験の内容をPromptで確認してから実行するという動作です)
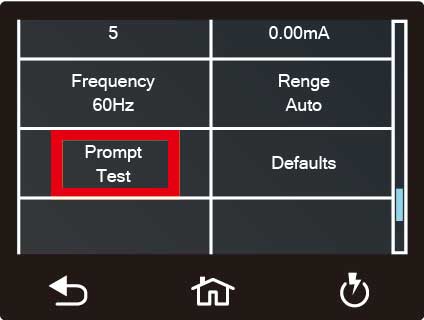
「Prompt」の項目を空白にしておけば、Promptは表示されずに自動的に次の試験ステップに切替ります。
試験ステップを繰り返して実行する機能は実装されていません。
747Xシリーズに実装されていた「Cycle Test」のような機能は実装されていないことになります。
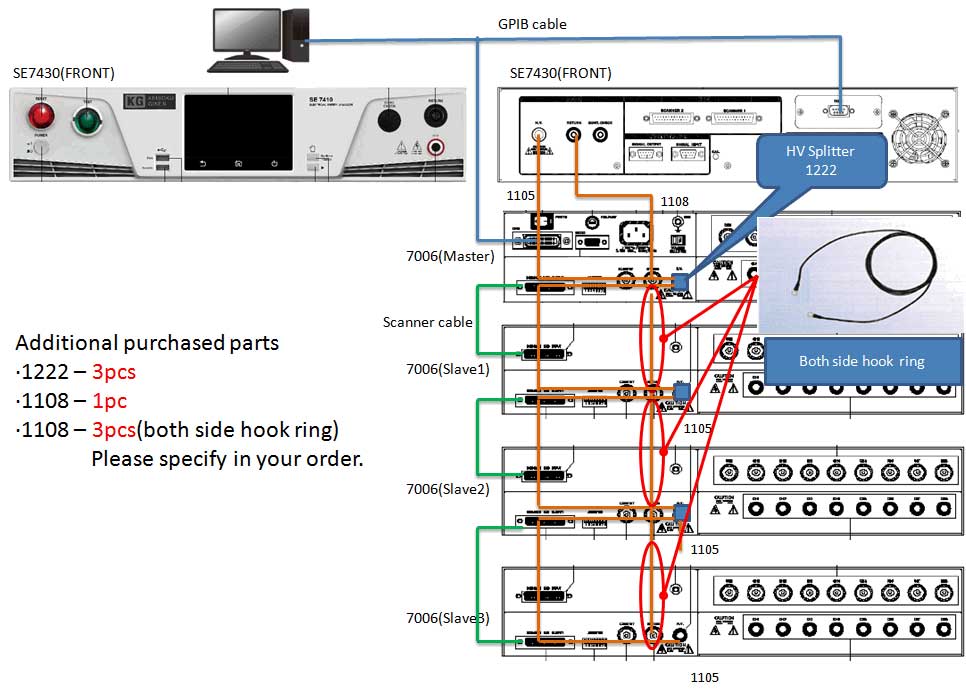
安全試験器SE7400シリーズとマトリクススキャナ7006x4を接続して構成するときは,以下の様に配線します。 そのため,以下のアクセサリを追加で購入する必要があります。
- GPIBケーブルx2(PC-SE7430、PC-7006(Master))
- HVスプリッター「1222」x3
- リターンリンクケーブル「1108」x1
- リターンリンクケーブル「1108」(両端フックリング)x3
7006を複数台用いて16チャンネル以上のチャンネルを制御する場合は,PCからのソフトウェアによる制御が必要となります。
試験中の最大電流値は、以下の方法で取得することができます。
- 試験終了後に「結果」から確認する
試験が終了したあとに「結果」をタッチすると試験結果のレポートが表示されます。
この中に最大電流値が表示されます。 - 「RDM?」コマンドを使う
リモートコマンドの「RDM?」コマンドを使うことによって、最大電流値をPCへ取り込むことができます。
なお、最大電流値はUSBメモリへ記録しません。
Microsoft Excelに組み込まれたVisual Basic (VBA)により作成したサンプルをご提供致します。SE7400シリーズの基本的なコントロールをUSBインターフェースで実現した例となっております。
プログラムの動作など詳しくはファイル内のセル及びVBAのコメントをご覧ください。
また、こちらのサンプルソフトウェアは事前予告なく内容が変更されることがあります。予めご了承ください。
【推奨動作環境】
OS : Windows7, 10
Excel 2007, 2010, 2013, 2016 (ただし、2016はWindows7での動作は保証せず)
8200(旧ESA-A)シリーズ (3)
安全試験器 ESAシリーズに400Hz/800Hz出力オプション(Opt.770)を追加したとき,選択できる出力周波数は以下の通りです。
- 50Hz
- 60Hz
- 400Hz
- 800Hz
Opt.770を追加しても50Hz/60Hzを選択することは可能です。
ESA-150のSync機能は外部から任意の周波数を入力して、その周波数でAC耐圧試験を行う機能ではありません。
周波数設定でSync機能を設定した場合、ESA-150の電源として入力されている交流電圧の周波数に合わせて交流耐圧試験を行います。
IKシリーズ/試験用治具 (4)
絶縁保護具自主検査器IKシリーズの試験用水槽は校正対象としていません。
7470のみの校正となります。
電極(TOJ-200)の材質と表面粗さの仕様は以下の通りです。
- 標準電極の材質及び表面処理
真鍮
Ni(3号)メッキ - 標準電極(円柱及び球)の表面粗さの仕様
仕上げ記号 ▽▽(旧JISの表面粗さ記号)
なお、JIS C2110には、
「絶縁破壊に伴う電極表面の損傷を少なくするには、ステンレス鋼製の電極を用いることが望ましい。」と記載されていますが、ステンレス鋼は加工の難易度が上がるため真鍮とメッキを使って電極としています。
油中電極治具装置の電極(TOJ-200)の交換時期を判定する明確な基準はありません。
目視にて電極に著しい摩耗や変色が確認されたり、試験データに異常が見られる時に、お客様のご判断にて交換をお願いします。
油中電極治具装置の電極(TOJ-200)の対応と形状は、以下の様に対応しています。
| 規格 | 形状 |
|---|---|
| JIS C2110② | 上:20φ球 下:25φ平 |
| JIS C2110③ | 上:25φ平 下:25φ平 |
| JIS C2110④ | 上:12.5φ球 下:12.5φ球 |
E-safety Player (2)
本ソフトウェアは、あくまで昇圧試験や段階昇圧試験 (JISC2110) の実施を補助するソフトウェアの為アーク放電試験やV-t 試験は実施できません。
実施する際は、7470シリーズ本体での操作で行なって下さい。
E-Safety Player内にて、1メモリあたりに設定できる最大印加時間は999.9秒になっており、数時間単位での設定はできません。
E-Safety Player を使用して、数時間単位での耐圧試験を実現するには以下の2つの方法があります。
- 印加時間を0秒に設定
印加時間を0秒に設定すると、耐圧試験器ののアラーム保護もしくは手動操作で停止しない限り、連続で耐圧試験を続けるようになります。試験を開始し、所望時間 経過後に手動操作で停止して頂ければ長時間の試験が可能です。 - 連続印加オプション搭載機器にてメモリ間を連結する
メモリ間を連結する事で最大999.9秒 * 50メモリ分の時間までの試験が可能になります。ただし注意頂きたい点として、連続印加オプションの有無に関わらず同じ電圧値が設定されたメモリ間を連結すると、一度電圧値がゼロになってから再印加するようになります。 先の点を許容頂くか、設定電圧に分解能分の±設定(※1)を許容頂く事で連続印加が可能になります。
※1) 設定の一例
・耐圧試験器7470 と E-Safety Player にて、AC10kV の連続印加を1時間 (3,600秒) 実施したい。
>連続印加オプション搭載機器にて以下の7メモリを連結する。
メモリ1 AC10kV 900秒
メモリ2 AC90.99kV 0.3秒
メモリ3 AC10kV 900秒
メモリ4 AC90.99kV 0.3秒
メモリ5 AC10kV 900秒
メモリ6 AC90.99kV 0.3秒
メモリ7 AC10kV 900秒
以上2つの方法の内、いずれも許容頂けない場合は、耐圧試験器本体での設定をお願いいたします。
RM-104 (6)
測定データを保存する機能はありません。
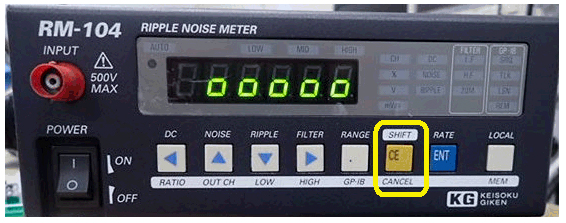
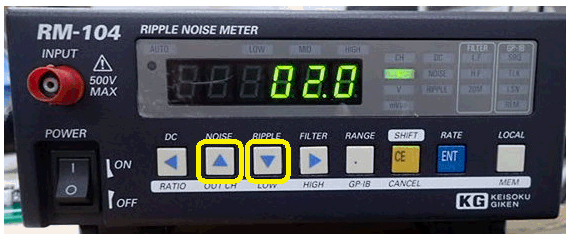
RM-103 RM-104「SHIFT」を押します。画面に「ooooo」と表示されます。
「RATIO」を押します。レシオの設定値が表示されます。
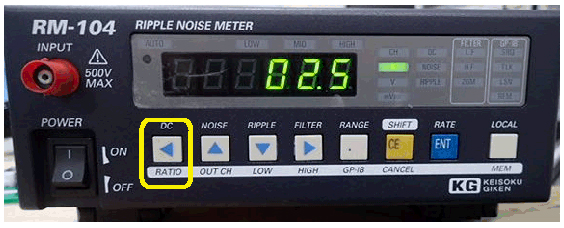
上下ボタンで0.5%の分解能で値を変更できます。
PCで制御する際に通信が出来ない場合は以下をご確認ください。
・電源コードが外れていないか
・電源スイッチが入っているか
・RM-104とPC間のコントロールケーブルが正しく接続されているか
・GP-IBアドレスは正しく設定されているか(他の機器と重複した番号になっていないか)
・SC-83(増設用切替スキャナユニット)が接続されている場合、SC-83の電源は入っているか
・SC-83(増設用切替スキャナユニット)が接続されている場合、SC-83のロータリースイッチがRになっているか

設定には順番があります。必ず上限値を先に設定し、その後に下限値を設定してください。
下限値は上限値より小さい値を設定してください。
RM-104をパソコンとUSBで接続したときに
・パソコンからCOMポートとして認識させること
・USB-COM変換ケーブルのようなもので変換し、パソコンとCOMポート接続で使用する
ということはできません。
USBで制御する場合は付属のActiveXコントロール経由で使用してください。
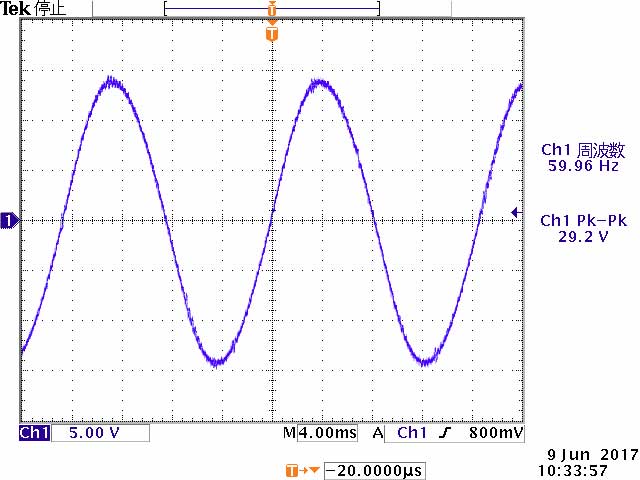
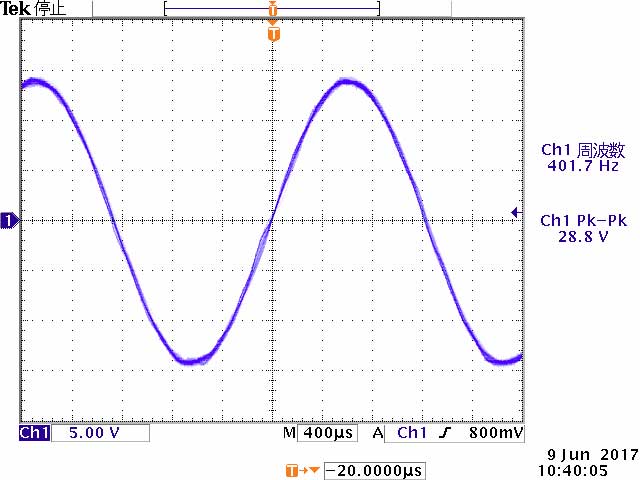
- リップル値は何を測定しているのでしょうか。
リップルノイズメータ RM-103に表示されているリップル値は、除去したいスパイクノイズ部を取り除いた時のPeak-Peakの値です。
除去したいスパイクノイズ部はリップル分離比(リップルレシオ)によって決められます。
例えばリップル分離比を2%(出荷時の設定)に設定すると0%から2%の間のスパイクノイズ部が分離され、Peak-Peakをリップル値として表示します。(図1参照)
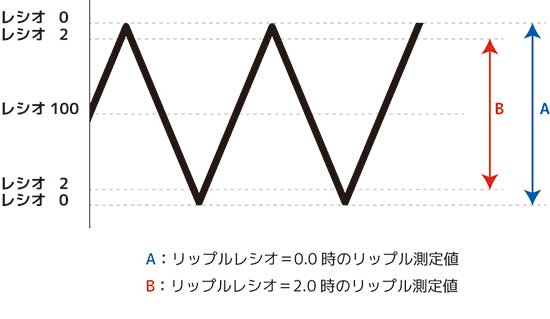
図1
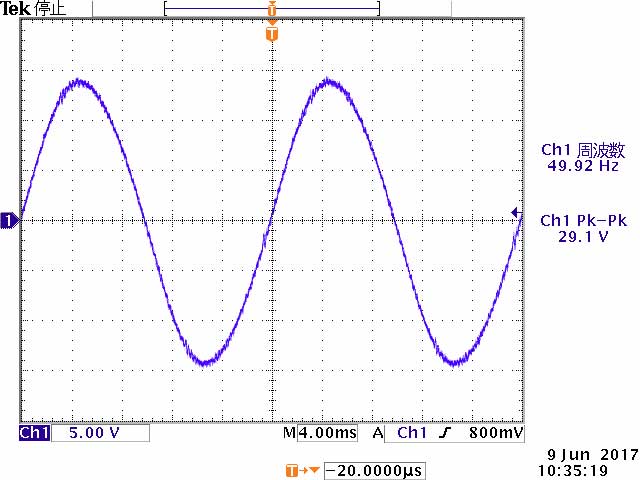
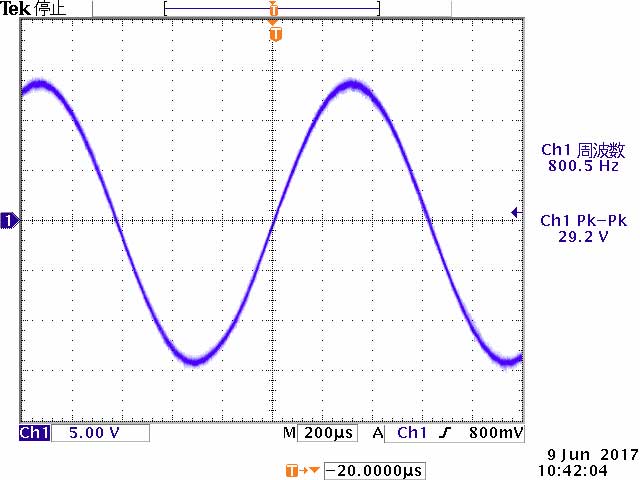
- 周期が明確でない波形や一定ではない波形は測定できますか。
以下のような波形でも周期が一定の波形と同じように測定が出来ます。
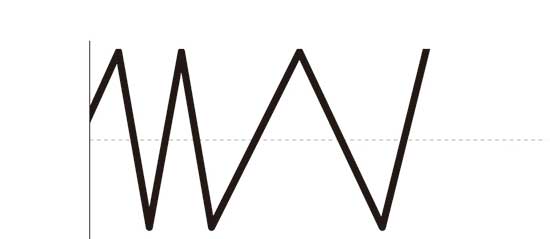
図2
※リップルノイズに関する情報は、「お役立ち情報」ページからもご覧いただけます。併せてご覧ください。
RM-103 (5)
Windows7(64bit)とWindows Vista(32bit)に対応する無償のサンプルプログラムをご用意しております。下記ボタンよりダウンロードの上ご利用ください。
こちらは、バージョン情報の取得とDC電圧測定のみを行う基本的なものとなっております。
※なお、本プログラムは無償サンプルとなりますため、サポートや保証はご容赦頂けますようお願い致します。
本製品は周囲温度23℃±5℃、湿度70%以下の環境において測定値の確度を保証しておりますので、この温度・湿度範囲内でご使用頂くことをお勧めします。
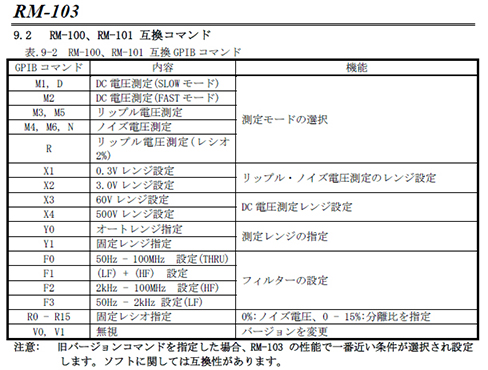
RM-101とRM-103の互換コマンドは以下のものとなります。
この内容はRM-103の取扱説明書27ページに記載されております。
RM-103の測定端子にはTRC-50F相当の機能がありますので、取り付ける必要はありません。
- リップル値は何を測定しているのでしょうか。
リップルノイズメータ RM-103に表示されているリップル値は、除去したいスパイクノイズ部を取り除いた時のPeak-Peakの値です。
除去したいスパイクノイズ部はリップル分離比(リップルレシオ)によって決められます。
例えばリップル分離比を2%(出荷時の設定)に設定すると0%から2%の間のスパイクノイズ部が分離され、Peak-Peakをリップル値として表示します。(図1参照)
図1
- 周期が明確でない波形や一定ではない波形は測定できますか。
以下のような波形でも周期が一定の波形と同じように測定が出来ます。
図2
※リップルノイズに関する情報は、「お役立ち情報」ページからもご覧いただけます。併せてご覧ください。
SC-82/SC-83(1)
システムに組み込まれているSC-82をソフトで制御し、測定を行った時に特定のチャンネルの値しか測定出来ません。
測定不能の理由としてはSC-82フロントパネルの「SELECT」が「R」ではなく、「1~8」までの有るチャンネルを設定したと考えられます。
DP-100 (7)
差動プローブ「DP-100」は、リップルノイズの測定に特化した差動プローブの為入出力間で非絶縁構造となり、確度としての規定は特にございません。
使用できますが、以下の点に注意してください。
DP-100は、50Ω終端で使用しますが、オシロスコープの50Ω終端は使用しないでください。
DP-100は入出力間は絶縁されていませんので、入力電圧によっては終端が焼損してしまいます。
弊社製TRC-50F2(高周波終端)を接続し、オシロは1M入力インピーダンスてご使用ください。
一般的な差動プローブとして以下の様なものが存在します。
- 高速差動信号を観測するための差動プローブ
デジタル回路の高速差動信号を観測するため、プローブに半導体回路が入っています。
入力できる電圧は、通常数Vでコモンモード除去に対してはDC~高域まで非常に高くなっています。
入力インピーダンスは非常に高くなっています。 - スイッチングデバイスの電圧を観測するための差動プローブ
電源回路でスイッチングデバイスに印加される高電圧を観測するため、プローブに高速な差動アンプが内蔵されています。通常電源スイッチング回路は、オシロスコープなどのGNDに対して大きなコモンモード電圧が掛かったり、FGや他chに対してリターン(GND)を共通にできないなど、これを回避するために使用します。
入力できる電圧は、通常数100Vでコモンモード除去に対してはDC~数MHz程度ではないかと思います。
入力インピーダンスは非常に高くなっています。
DP-100は、スイッチング電源の出力に現れるリップルノイズを観測するのに最適かつ低コストな差動プローブです。
コモンモード除去に対しては、上記の差動プローブとは異なりDCでのコモンモード除去能力はありません。
入力インピーダンスは50Ωとなっていますので、入力電圧によっては終端抵抗を焼いてしまう可能性がありますので弊社指定の高周波終端(TRC-50F2)をご利用ください。
DP-100の最大入力電圧は、±200V (DCまたはACp-p) となっております。詳しくは、こちらに記載の仕様をご覧ください。
性能保証の温度範囲は23±5℃です。
使用温度範囲は23±20℃です。
差動プローブDP-100は分解できない構造となっておりますため、修理・校正はできません。
保存温度範囲は 0~50℃です。
TRC-50F2(1)
TRC-50F2は消耗品の扱いとなりますため、修理・校正・点検はできません。
SCAT (28)
SCATでの数値表現には小数表現(例:0.00015)と、指数表現(例:1.5e-3)がありMKSA単位系で表示されます。
また、指数表現の形式は(仮数部)e(符号)(指数部)
例
0.047 は 4.7e-3
95200 は 9.52e4
となり、使用できる指数記号は以下の通りです。
| p | 1.0e-12 |
| n | 1.0e-9 |
| u | 1.0e-6 |
| m | 1.0e-3 |
| k | 1.0e+3 |
| M | 1.0e+6 |
| G | 1.0e+9 |
| T | 1.0e+12 |
【注意点】
1.0e-6(マイクロン)を示す指数記号はuとなっており、1.0e+3(キロ)を示す指数記号は小文字のkとなっています。
また、PC内部での演算精度からシミュレーションする回路での素子定数の設定範囲は1.0e12程度が最適であり1.0e17〜1.0e18を越える素子定数の設定では演算誤差が発生します。
素子定数としてシンボル(Symbol)、オン抵抗(Ron),オフ抵抗(Roff)、オン電圧(Von),最大蓄積電荷(Qmax)があります。
内部素子として、アノード・カソード間抵抗(R)、ダイオードの両端オープン素子(S)、オン電圧(V)があります。
SCOPEへの出力変数としては、Rの電流(I)とSの電圧(V)が選択できます。
逆方向回復特性を解析する場合にはQmaxに蓄積電荷量を設定します。下図のように、ダイオードが逆バイアスされた時点でQmaxが正の値の場合、逆方向電流の積分値がQmaxになるまでON状態が持続して順方向電流が流れます。
この逆回復特性の動作状況はステート画面にRECとして状態表示され、遷移時間・経過時間も示されます。
通常の変圧器の一次側に過飽和インダクタを並列に接続します。
応用例としてSICFWD回路を参照ください。
投稿回路集の回路事例を参照ください。
- M.Nakahara and T.Ninomiya:”A General Computer Algorithm for Analysis of Switching Converters”
IEEE PESC’92 Record,pp.1181-1188 (Jun.1992) - 中原:”スイッチング電源の一般解析アルゴリズム”
電子情報通信学会論文誌(B−I),Vol.J77-B-I,No.10,pp.640-647 (平6-10) - M.Nakahara and T.Higashi:”A General Algorithm of Steady-State and Transient Analysis for Regulated Switching Power Converters”
JTC-CSCC’95 Proceedings,pp.527-530 (Jun.1995) - M.Nakahara and T.Higashi:”A Fast Algorithm of Steady-State and Transient Simulations for Controlled Switching Power Supplies”
INTELEC’95 Proceedings,pp.616-621 (Nov.1995) - M.Nakahara:”A Fast Computer Algorithm for Switching Converters”
IEEE Trans.PE-12,No.1,pp.180-186 (Jan.1997) - M.Nakahara and T.Higashi:”A Fast and Stable Simulation Algorithm with Self-Optimization of Time Step for Switching Power Converters”
IEEE PESC’98 Record,pp.1105-1110 (May.1998)
C、Lの直並列回路
- 定電圧電源にCを、定電流源にLを接続
- OPアンプを利用した積分器のC
- 素子の定数範囲
- 状態が確定しないスイッチ素子
- 複数のトランスのコイルを直列接続
- ダイオードにLを直結した場合のステートエラー
- C、Lの直並列回路は避けて、一つのC、LLにまとめる
- Cの直列は一つにまとめる
- Lの並列は不可
※変圧器を介してC、Lが直・並列接続される場合には回路特性に影響しないようなRをC、Lに付加する。 - 定電圧電源にCを、定電流源にLを接続したような電流・電圧が無限大に達する場合はシミュレーションできない。適当なRを付加して減衰波形にする
※電源の安定化用としてCを接続してシミュレーションエラーとなる事例が結構あります。SCATでの電源は理想電源となっていますので、シミュレーション時には安定化のCは無視するか、ESR相当の抵抗を付加するか、配線分の寄生抵抗を付加してください。
OPアンプを利用した積分器などでフィードバック素子としてCのみを使用した場合にもこの問題が発生するためにカットオフ周波数見合いのRを付加してください。
素子の定数範囲が1.0e12を越えるような極端な設定はしません。
(素子定数範囲が1.0e17を越えると演算精度が保証されません)
状態が確定しないスイッチ素子がある場合には、素子に並列に微少容量のCを付加します。
※1周期で1000を越える状態変化があるときは演算が不安定となります。
※Parameter:Teps(最低持続時間)はデフォルトで10-20になっていますが、スイッチング周波数の千分の一を目安にしてTepsの設定値を大きくしてください。
STATE画面でエラー表示されている行で状態が変化しているスイッチ素子に注目してください。
STATE画面で表示されるエラーステータスは次の2種類があります。
S:状態決定失敗
T:状態変化時刻決定失敗
下図のようにSCATウィンドウの上部にもエラー発生状況が表示されますので最初にシミュレーションする場合や、回路定数を変更してシミュレーションする場合にはこのエラー表示がでていないかどうかチェックしてください。
素子の配線は自動接続を利用します。(結構多いケースです!!)
制御Gainは最初小さい値から始めて各スイッチの動作状況を確認後、徐々に大きな値に設定していきます。
右図のような回路含む回路でState Errorが発生した場合には、右図のように高抵抗RをLに並列に接続します。
複数のトランスのコイル(ワインディング)を直列接続する場合には寄生の抵抗を付加してください。
スイッチ素子のSourceは安定した電圧源に接続されることを想定しているために、降圧型回路でSourceが電源側に接続されていない場合に動作が不安定となります。その結果、解析エラーやState Over等が発生する場合があります。
解決方法は、MirrorHコマンドを使用してSourceを安定した電圧源側に接続してください。回路的には等価で動作します。
《悪い接続例》
《Sourceを安定側に接続した回路》
なお、複雑な回路でスイッチ動作がうまくいかない場合にも、source側の電圧が安定しているかどうかを検討してください。
電源にCを並列に接続したり、電流源にLを直列に接続するのはSCATでは不正接続となります。
※周波数特性解析器FRAの交流印可電圧源Vac設定電圧値が1μVであればTransient解析実行時のCompensationチェックON/OFF操作は必要ありません。
- 周波数特性解析実行時にParameter: ConditionのCompensationチェックボックスがONになっていると周波数特性解析が正しく行われない場合があります。
- 周波数特性解析器FRAの交流印可電圧源Vac設定電圧値が1μVではほぼ問題はありませんが、Vac設定電圧値が1mV以上になるとこの現象が発生します。
- 周波数特性解析実行時にはParameter: ConditionのCompensationチェックボックスをOFFにして実行してください。
- なお、直流オフセット電圧Vdcを自動検出させる為のTransient解析実行時にはParameter: ConditionのCompensationチェックボックスはONにしておいてください。
※周波数特性解析器FRAの交流印可電圧源Vac設定電圧値が1μVであればTransient解析実行時のCompensationチェックON/OFF操作は必要ありません。
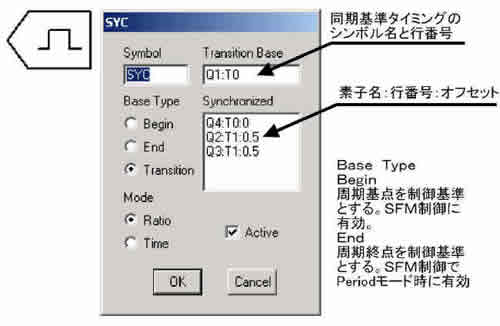
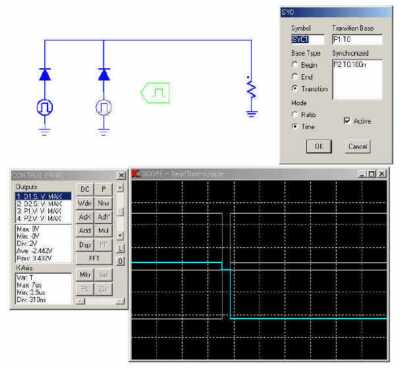
SYC(同期制御素子)の設定でBaseType(同期基準タイプ)をBegin(又はEnd)にした場合には1スイッチング周期の開始点(又は終了点)が同期基準点となります。
同期基準点がBaseの場合にはスイッチング周期が同期制御の基準タイミングとなりますので、スイッチ素子の固定デッドタイム設定を設定する場合に使用されます。
周期の最初に固定デッドタイムを設定
たとえば、Onディレイが300ナノ秒のスイッチ素子をQ1として使用する場合には次のように記載します。
Base Type :[ Begin ]
Mode :[ Time ]
Transition Base :灰色となり設定は不要
Synchronized :Q1:T0:300n
周期の終わりに固定デッドタイムを設定
同様に、スイッチング周期の最後で動作中のスイッチQ2オフタイミングにも500ナノ秒の固定デッドタイムを設定したい場合には、新たなSYC(同期制御素子)を追加します。
Base Type : [ End ]
Mode : [ Time ]
Transition Base : 灰色となり設定は不要
Synchronized : Q2:T1:-500n......スイッチQ2はすでにON状態と仮定
オフセット値にはマイナスの値も設定できますので、スイッチQ2はスイッチング周期の最後から500ns手前で動作することになります。
他のスイッチの動作終了後に固定デッドタイムを設定
PWM制御されているスイッチQ1のOFFタイミング(Q1:T0と仮定)から300nsの固定デッドタイム後にスイッチQ2をON(スイッチQ2はInitial Mode:OFFと仮定)させたい場合には、次のように記載します。
Base Type : Transition
Mode : [ Time ]
Transition Base : Q1:T0
Synchronized : Q2:T0:300n......スイッチQ22はInitial Mode:OFFと仮定
この設定により、PWM制御により刻々と変化するスイッチQ1のOFFタイミングから300nsの固定デッドタイムを保持しながらスイッチQ2がONすることになります。
固定発振だけだったらBaseTypeにBegin/Endを指定しても役に立たない!とお考えの方に!!
SCATにはPWM変調の他にSFM(周波数変調器)とDPM(素子パラメータ変調器)があります。このうちでSFM変調を回路に加えればスイッチング周波数を変調できる訳ですから、このBaseTypeのBegin/End指定による同期制御も十分に役立つ訳です。
従って、PWM制御により変調制御がかかるスイッチとSFM制御により変調がかかるスイッチ等が混在した形でシミュレーションが可能となります。
PWMスイッチ設定メニューのInitial StateでのON/OFFチェックボックスにより1スイッチング周期での立ち上がり・立ち下がりが指定できます。
右図のPWMスイッチ設定メニューではInitial StateがOFFとなっており、Transition(遷移タイミングの記述)は、
0.5
0.75
となっていますので、スイッチング波形は右図のようになります。
PWMスイッチのTransitionにはスイッチの状態変化タイミングを1行毎に記述していきます。なお周波数変調やシミュレーション過程でスイッチング周波数を変更する場合に備えてTransitionのModeはRatio(1周期内での時間比率)を設定しておくほうが解析しやすくなります。
例として、ModeがRatio(時比率)の場合に0.15でON、0.25でOFF、0.5でON、0.75でOFFとなる場合には右図のPWMスイッチ設定メニューではInitial StateがOFFとなっており、Transition(遷移タイミングの記述)は、
Initial State:OFF
Transition
0.15
0.25
0.5
0.75
と設定します。なお、このTransitionの最大設定行数に制限はありませんが、シミュレーション全体での1周期内総合遷移状態は最大1000回です。
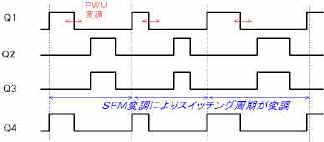
PWM制御素子でQ1を制御し、Q2〜Q4はSFM(周波数変調制御器)によりスイッチング周波数を制御しています。ここでSYC(同期制御器)のBaseType(同期基準)はBegin(スイッチング周期の立ち上がり)に設定していますので各スイッチのタイミングは下図のように制御されます。
PWMスイッチQ3・Q4について別のPWM制御と同期制御をかけたモデルです。このモデル回路に実用的な意味はありませんが、異なる制御量から別のスイッチ回路へのPWM制御と同期をかけることも簡単にできます。
*解析モードでTransient又はWave Formを実行して、制御対象のスイッチのTransientデータが書き変わっているかを必ずチェックしてください。制御がうまくいかない原因は、PWM制御器のGain設定値の不適切とSynchronizedに設定する内容の間違いです。
PWM素子やSYC素子を含んだ回路で、制御対象のスイッチを削除したり、シンボル名を変更した場合には一旦、PWM素子やSYC素子を削除して再定義しないとTopologyモードからAnalysisモードへ移行する時に”Inverse matrix may be invalid”や”Reduced matrix may be invalid”のエラーメッセージが表示されます。
PWM素子やSYC素子を含んだ回路で上記のエラーメッセージが表示されて、同期制御対象のスイッチ素子を変更・修正した場合には、必ずPWM素子・SYC素子の再定義を実行してください。
実際の素子でのデッドタイムをSCATでシミュレーションする場合の設定例を紹介します。
下図のZVS-PWM降圧型コンバータでスイッチS1・S2のONデッドタイムを300nsとして設定しています。
PWM制御器でスイッチS1がOFFとなるタイミングを制御して、同期制御器SYCではスイッチS2のONタイミングがスイッチS1のOFFタイミングから300ns遅延するようにTransition Base:S1:T1 Synchronized S2:T0:300nと設定しています。
また、スイッチS1には初期モードOFFで先頭行が時間モードにて300ナノでONとなるように設定しており、下図のようにスイッチS1,S2ともに300ナノ秒の固定デッドタイムを維持して動作します。
- 電力を測定したい素子のVとIを出力に追加します。
ParameterメニューのOutputウィンドウで素子出力を追加します。
この例では素子rqの電圧(V)と電流(I)を出力に追加しています。
- Scope画面のメニューウィンドウでMul(乗算)機能を使用して 電力波形を追加します。
測定する素子の電圧にマウスをあわせ反転表示されたら「Mul]ボタンをクリックし、その後測定する素子の電流にマウスをあわせます。
この例では出力波形4として%2 * %3Mulと名前のついた乗算結果が新規波形として追加されました。
この波形を選択すると下図のように表示区間内の平均電力・実効電力が表示されます。
Wave Form解析でのScope画面
Save WVFで保存したBSTRVF.wvfファイルの内容
/*K466PR4 bstrvf.wvf
Scope Data
T T *** Min 0 Max 2.31578e-05 Div 2.31578e-06
Lr I MAX Min -20 Max 20 Div 5 Ave 1.36894 Rms 2.9295
Cr V MAX Min -800 Max 800 Div 200 Ave 5.0009 Rms 168.784
R V MAX Min -20 Max 20 Div 5 Ave 13.6893 Rms 13.6893
*/
Irms ***
Vrms ***
Pin ***
PF ***
OUTPUTS 3
T T *** Lr I MAX Cr V MAX R V MAX
0 -1.22835e-05 1.95284 13.6364
6e-11 -1.227e-05 1.99343 13.6364
1.2e-10 -1.22384e-05 2.03401 13.6364
1.8e-10 -1.22009e-05 2.0746 13.6364
2.4e-10 -1.21613e-05 2.11518 13.6364
3e-10 -1.2121e-05 2.15577 13.6364
3.6e-10 -1.20806e-05 2.19635 13.6364
TMに読み込ませるには、下図のように外部データの取り込みでテキストファイルのインポートを指定します。
そしてファイルの種類で「すべてのファイル」を選択し、先ほどのWVF形式ファイルを選択し、「インポート」をクリックします。
テキストファイルウィザードではデフォルトの設定のままで「完了」をクリックして問題ありません。EXCELLTMでの表示画面です。
なお、回路のネットリストは拡張子がCVTとして保存されており、内容は下記のように個々の素子定数がテキスト形式で記載されています。
/* K466PR4 bstrvf.cvt */
LX DA 3 4 L 0.0001 0
LX DA 5 3 Lr 6e-05 0
CX DA 0 3 Cr 1e-08 0
CX DA 0 2 C 0.0001 0
RX DA 0 2 R 10
UV DA 0 6 Vr 15
UV DA 0 4 Ei 5
SP DA 0 7 Q 0.1 1e+06 OFF 1 0.217436
DI DA 3 7 Df 0.1 1e+06 0.6 0 0
DI DA 5 2 Do 0.1 1e+06 0.6 0 0
DI DA 0 7 Ds 0.1 1e+06 0.6 0 0
FM DA 6 2 SFM ON 0 10000 100000 70000 200000
OU Lr I MAX 253 47 16777215 1 -20 20 0
OU Cr V MAX 253 52 16777215 1 -800 800 0
OU R V MAX 253 47 16777215 1 -20 20 0
FS 86364
.ANALYSIS_PARAMETERS
Ndivta 1
Ndivtw 100
Tsteps 1e-20
Stdeps 1e-06
Btrcmp 1
また、回路作成時に同時に作成される拡張子SHPのファイルは
/* K466PR4 bstrvf.shp */
LX DA 189 -354 348 -276 309 -294 16711680 5 7
WSY 240 -258 282 -222 0 0
LX DA 507 -354 666 -276 627 -294 16711680 5 7
WSY 552 -258 610 -222 0 0
CX DA 309 -547 387 -388 327 -508 16711680 5 6
WSY 393 -487 454 -451 0 0
CX DA 786 -547 864 -388 804 -508 16711680 5 6
WSY 726 -484 771 -448 0 0
RX DA 966 -550 1008 -391 978 -511 16711680 5 6
UV DA 946 -975 1024 -816 964 -936 16711680 5 6
WSY 1024 -918 1085 -882 0 0
UV DA 150 -547 228 -388 168 -508 16711680 5 6
WSY 228 -484 279 -448 0 0
SR DA 348 -315 507 -310 387 -315 16711680 5 3
SR DA 825 -315 987 -310 867 -315 16711680 5 3
SR DA 189 -633 194 -547 190 -613 16711680 5 2
SR DA 987 -633 992 -550 988 -613 16711680 5 2
SR DA 189 -633 984 -628 387 -633 16711680 5 3
SR DA 507 -474 594 -469 528 -474 16711680 5 3
SR DA 987 -391 992 -315 988 -372 16711680 5 0
SR DA 825 -388 830 -315 826 -371 16711680 5 0
SR DA 825 -633 830 -547 826 -613 16711680 5 2
SR DA 348 -633 353 -547 349 -613 16711680 5 2
SR DA 348 -388 353 -315 349 -371 16711680 5 0
SR DA 189 -388 194 -315 190 -371 16711680 5 0
SP DA 468 -633 546 -474 486 -594 16711680 5 6
WSY 405 -576 453 -540 0 0
DI DA 480 -474 534 -315 492 -354 16711680 5 6
WSY 537 -411 595 -375 0 0
DI DA 666 -342 825 -288 705 -300 16711680 5 7
WSY 717 -276 784 -240 0 0
DI DA 567 -633 621 -474 579 -594 16711680 5 6
WSY 627 -573 694 -537 0 0
FM DA 811 -849 985 -753 856 -825 16711680 5 6
WSY 841 -903 936 -867 0 0
WFJ DA 985 -799 1093 -771 1012 -778 16711680 5 5
TRM1
WSY 979 -761 1099 -725 65280 0
WFJ DA 987 -329 1095 -301 1014 -308 16711680 5 5
TRM1
WSY 981 -291 1101 -255 65280 0
WGR DA 955 -1029 1015 -975 970 -1014 16711680 5 2
WGR DA 957 -687 1017 -633 972 -672 16711680 5 2
WCM 153 -191 1095 -150 255 0
SFM Controlled ZVS Resonant Boost Converter
このように素子配置の位置情報が記載されています。
拡張子をMEMとしてテキスト形式のファイルを同一名で保存しておくとシミュレーション回路での注意事項等が、SCATのWindow → Information→Memoで参照できます。シミュレーション回路検討中の覚え書き等々有効に利用してください。
このときのSCOPE画面表示は左下図で、保存したWVFファイルをWindowsアクセアリーの「メモ帳」で開くと、ファイルの内容は右下図のようになっており、CSV形式のテキストファイルとなっています。
/*〜*/で囲まれた区間にはSCATバージョン番号、ファイル名称、X軸表示モード、下限値、上限値、X軸目盛り刻みの後に、Paremeter:Outputで指定した出力変数毎のScope画面表示内容が記載されています。
ここで、左端の列(TT)は状態変化の発生した時間データとなっており、以降Outputに指定した出力が記載されています。
- SCATでの各種制御素子の優先順位は
高い SFM > PWM > SYC > DPM 低い
となっております。 - 低周波近似波形の周波数はスイッチング周波数の1/10以下として、スイッチング周期内では一定値として近似されます。
Modulator全素子については周期内では制御量は固定です。(ただし、線形補正で制御量を予測しています)
交流電源・LFG・Logic以外のOperator素子も周期内では一定値として近似されます。
※Logic素子は周期内でも即時応答します。
位相が180度から始まっているのは、実際の位相に360度を加えているからです。
負帰還動作では、すでに-180度位相が回るので
360度 – 180度 = 180度
となり、実際の位相の値が0度のとき計算では180度となります。360度を加算するのは、位相安定性の判断を容易にするためです。
SCATの周波数特性は”FROM”の信号をV1、”TO”の信号をV2とすれば、G = V2/V1の周波数特性を計算します。
具体的には
Gain = 20log(10) | V2 / V1| (dB) (Log10の表記です)
Phase = ∠G (度)
と計算します。
従いまして”FROM”をI、”TO”をVとすれば、インピーダンスZ = V / Iの周波数特性が計算できます。
Zの大きさがゲイン(但しdB)でわかり、I, Vの位相差が位相で求められます。
具体的には
|Z| = 10Gain/20 (Ω)
∠Z = Phase (度)
となります。
SCATでは、自動で解析を実行するスクリプト解析機能があります。
解析で使用するスクリプト言語はC言語に似た言語で、テキストファイルで書いて拡張子をscrにして保存し、読み込むことで解析を自動化することができます。
たとえば、ファイルを読み込むスクリプト言語は
ReadCircuit(“cvtファイル名”);
となります。
具体的な実行方法は、”マニュアル(K492PR2refMNL.pdf)”の P.114の”5.9スクリプト解析”を参照ください。参考の解析例も記載されています。
また、使用できるコマンドの一覧はP.159の付録に記載しています。
スイッチング周波数の値を取得する場合、プログラマブル素子に以下の通り記述をしてください。
param("Fs","Value");
スイッチング周波数のシンボルは”Fs”になります。このシンボルのパラメータ”Value”を読み込むことで、
プログラマブル素子にスイッチング周波数の値を取得できます。
インダクタの回路素子は、Analysisモードに移行するときの回路の確認時に短絡していると考えて回路が矛盾していないか判断します。そのため、回路中にインダクタのみの閉ループがある場合、矛盾しているとしてエラーが出ます。
解決策としては、インダクタに抵抗(影響しない小さな値)を加えて、インダクタのみの閉ループをなくすようにしてください。
SCATでは、スイッチングごとにPRC素子に記載したプログラムを実行します。そのため、変数は記録されずにリセットされます。
値を保存する方法は、値を素子のパラメータに書き込んで保存する方法があります。プログラム中に値を “setparam” 関数で素子のパラメータに書き込んで、次の周期で “param” 関数で読み込むことで、次の周期で利用することができます。
別の事業所からのネットワークライセンスの使用は、問題ありません。
問題が発生したため、プログラムが正しく動作しなくなりました。
プログラムは閉じられ、解決策がある場合はWindowsから通知されます。
この現象は、実行した解析の使用メモリがSCATのメモリ上限値である2GBを超えてしまったため発生するものです。
SCATの内部処理においては、使用メモリの上限値が2GBと決まっており、PCのメモリサイズは関係しません。そのため、PCのメモリを増設しても効果はないか、あっても非常に薄いものとなります。 ソフトウェアの構成上改善は難しく、現状は運用方法にて回避するしかありません。
回避方法は「解析モードのTransientとWaveformを使い分ける」と いうものです。 Transientがスイッチング周期に代表点1個の計算値を行い メモリに保存するのに対して、Waveformはスイッチング周期の 波形を全て計算して数百個の点をメモリに保存します。
例えば、過渡解析で最初の部分はあまり興味がなく、 しばらく時間がたった定常状態の波形を調べたい場合は以下のようにします。
- Transientで興味のない部分を適当な100サイクルシミュレーションする。
- Parameter:Updateで初期値を更新する。
これにより、次回のシミュレーションはここからスタートします。 - Waveformで調べたい波形部分を適当な10サイクルシミュレーションする。
つまり、興味のない部分はTransientでスキップして、詳細に調べる 部分だけ的をしぼってWaveformでシミュレーションするという事です。
パルスのエッジによってDSPで割り込みを行うことはできません。
DSP素子の演算はサンプリング(スイッチング)周期の初めに演算される動作のため、途中で割り込みを行うことは不可能になっております。
トリガ素子を使用すると、パルスのエッジによってスイッチング周期の開始タイミングを変更できますが、 スイッチ素子のタイミングも変化してしまいます。 そのため、動作をさせるのに回路の構成やシミュレーションの条件に合わせた工夫が必要になります。
OCX関連 (8)
上記のエラーが出る場合は、以下の手順で登録を行ってください。
- 添付CDのDriverフォルダーにあるDPInst.exeをダブルクリックしUSBドライバーをインストールします。
- LNシリーズとPCをUSBで接続し、ドライバーのインストールを完了させます。
- デバイスマネージャー上にLNシリーズが表示されていることを確認します。
- Excelを起動しOCXの登録を行って下さい。
1.既存環境で挿入しているOCXを削除し保存します。
2.新しいバージョンのOCXをインストールした環境にてマクロを開き、OCXコントロールを挿入します。
古いOCXのキャッシュが残っているとうまく動作しない場合があります。
OCXのキャッシュ削除方法は以下の通りです。
1.Excelを開いている場合は終了します。
2.タスクバーの検索欄に”%temp%”と入力し、開くをクリックします。
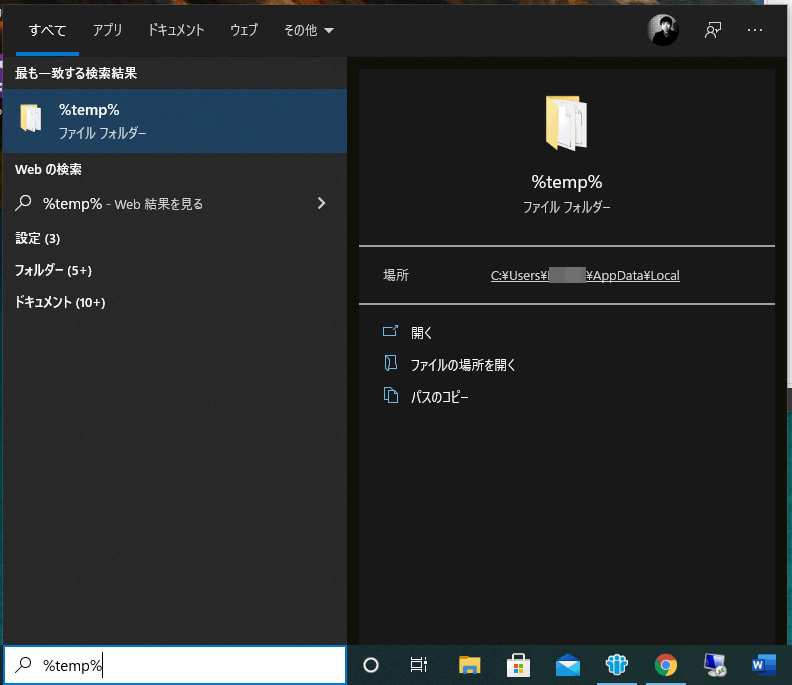
3.”Excel8.0″フォルダーを削除します。

この現象の一番の要因は想定しているドライバーのサービスが見つからないことに起因しています。
この”想定している”ドライバーとはOCXを利用する際に使用しているKG向けUSBドライバーのことです。
一部の製品においてはドライバーのインストーラーにてインストールを行えるようにしていますが、これだけでは不十分で一度PCに実機を差し、USBドライバーの本当の意味でのインストールを完了させる必要があります。
この作業は、一度どこかのUSBポートで行えば以降は不要です。
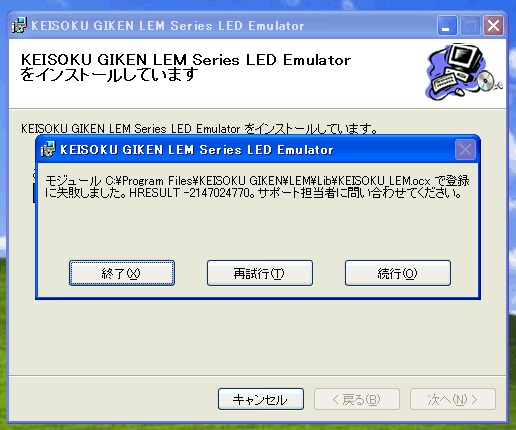
LEの場合、OCXインストール時に以下のようなエラーが表示されます。
64bit環境では基本的に使用することはできません。
最新のExcelはネイティブ64Bit対応版と32Bit版が存在しており、32Bit版のExcelでは利用可能ですが64Bitネイティブ版のExcelでは利用できません。
VisualStduioからも32Bitアプリケーションプロジェクトでは利用可能ですが、64Bitアプリケーションプロジェクトでは利用できません。ただし、OCXがアクセスするのに使用しているUSBドライバーが64Bitに対応している必要があります。
各製品に添付しているOCXのCmdRcvメソッドを使おうとした際に、初期化されたobject型インスタンスを参照渡しすると例外が発生します。
回避方法は、newによるインスタンス初期化は行わずにnullで初期化したものを参照渡しで渡してください。
コマンドプロンプトから登録することができます。
以下、その手順です。
- コマンドプロンプトを管理者権限で実行します。
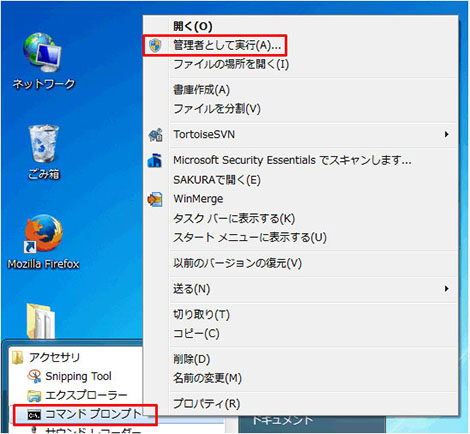
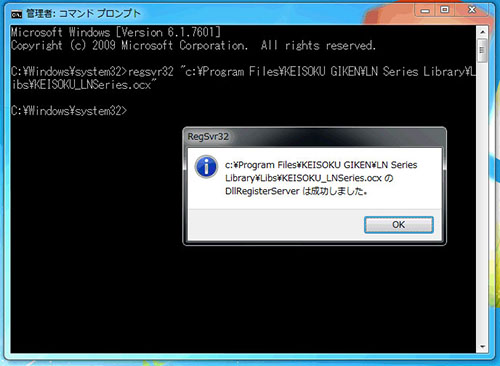
- “regsvr32 [OCXのファイルパス]”と入力します。
例: regsvr32 C:\Program Files\KEISOKU GIKEN\LN Series Library\Libs\KEISOKU_LNSeries.ocx - 登録が完了すると以下のメッセージが表示されます。
- コマンドプロンプトを閉じます。
以下、VS2008での説明となります。
- 製品添付のOCXをインストールします。
※USBドライバーのインストールが完了し、PCより認識可能になっている状態でインストールを行ってください。
インストール方法 - VisualStudioのツールボックスへOCXを追加します。
ツールメニューのツールボックスアイテムの選択をクリックします。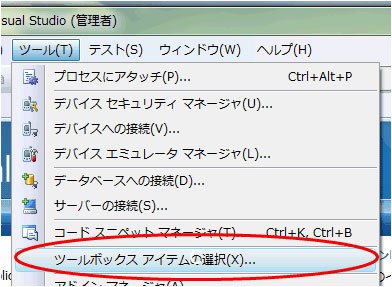
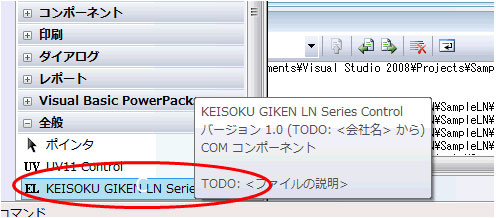
COMコンポーネントのタブで”KEISOKU GIKEN LN Series Control”にチェックを入れます。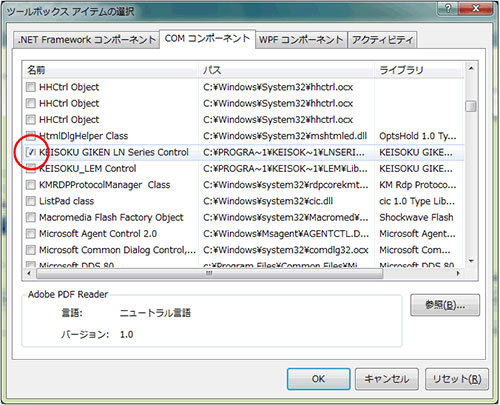
- Windowsフォームアプリケーションプロジェクトを作成し、フォーム上にツールから”KEISOKU GIKEN LN Series Control”をクリックしフォームにコントロールを貼り付けます。
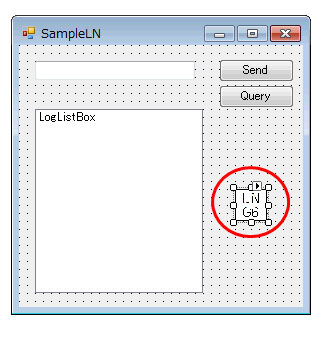
- プログラミングを行います。

※戻り値を取得する場合、例外が発生する場合がありますので、必ずnullで初期化したものを渡してください。
合わせて読みたい
エラーの原因としては、ご利用頂いているPCのUSBデバイスの状態に何らかの問題が出ている可能性が考えられます。
まず、USBドライバがPCに正しくインストールされているかをデバイスマネージャー上でご確認頂き、もしデバイスマネージャーから正しく認識されている場合は以下をお試しください。
- Excelのショートカットで右クリック、プロパティを選択します。
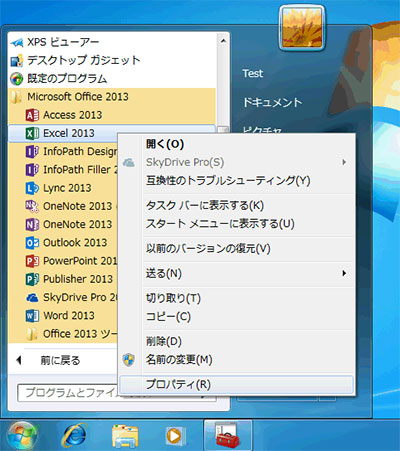
- 互換性のタブで、”管理者としてこのプログラムを実行する”にチェックを入れて適用ボタンをクリックします。
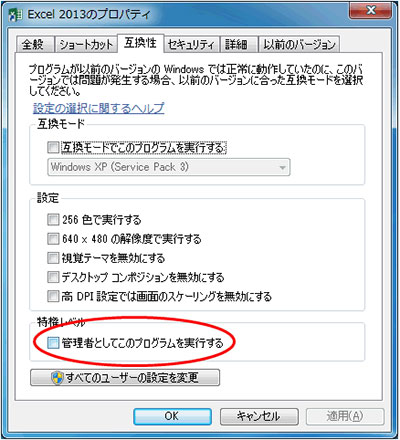
- Excelを開きます。開くときに以下のメッセージが表示されるので、”はい”をクリックします。
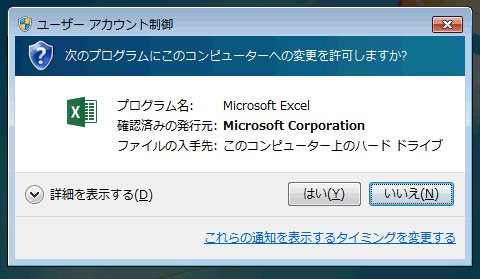
- 取説に記載のある通りにOCXを登録します。
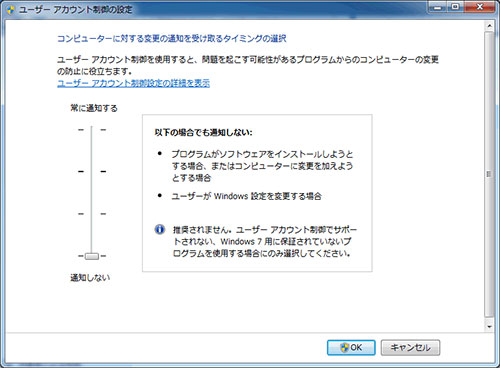
※補足
Excelを起動すると毎回項3の警告が表示されます。通知を表示したくない場合は、”コントロールパネル→ユーザーアカウントと家族のための安全設定→ユーザーアカウント→ユーザーアカウント制御設定の変更”を開き、通知しないに設定すると表示されなくなります。
LabView(1)
E-Load Playerの各データは最大100,000ポイントまでとなります。(取扱説明書に記載の通りです。)
ただし、Excel等でファイルを開いた場合、表示できる行数の制限が65,536行までとなります。
PowerTestSiteシリーズ® (54)
下図をご参照ください。
ご使用のPCに対し、NI 製品のドライバをインストールする前に PowerTestSite シリーズをインストールしてしまうと、PCでは認識されているにも関わらず、PowerTestSite 上でのみ NI製品が認識されず、添付のようなエラーが発生する可能性があります。
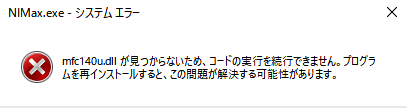
その際は、NI ドライバとPowerTestSite シリーズを一度アンインストールして頂き、ご購入頂いた際に付属の 「PW-700, PW-5000 システム取扱説明書 (M-2415) 」 の手順に従ってNIドライバ → PowerTestSite シリーズの順にインストールして頂くと正常な認識状態となります。
下図をご参照ください。
1台の試験機器に対し、短時間に連続的なコマンド処理が集中してしまっている為、処理が追い付かずにエラーが発生している事が考えられます。
対策として、適切な(約1秒程の) wait timer を設けたり、検査プログラムの順番を見直し、1台の試験機器に対して短時間での連続的なコマンド処理を集中させないようにしてください。
シートファイルが移動・削除された可能性があります。Windowsエクスプローラなどでファイルの有無を確認して下さい。
プロジェクトに関連づけされたファイルが、移動・削除されている可能性があります。Windowsエクスプローラなどでファイルの有無を確認し、ProjectPropaty で正しい場所に変更するか、指定された場所にファイルを移動させて下さい。
Templateフォルダにsysytem.psfが無いか、Program.pspが無いと考えられます。Windowsエクスプローラなどでファイルの有無を確認して、sysytem.psfが無い場合は c:\PowerTestSite\Bin\TEMPLATEフォルダにSystemTemplateFDからsystem.psfをコピーして下さい。 Program.pspが無い場合は、PowerTestSiteを再インストールして下さい。
プロジェクトに関連づけされたファイルが、移動・削除されているか、間違って指定している可能性があります。エクスプローラなどでファイルの有無とパスを確認して下さい。
Templateフォルダに画像ファイル(例:pict.bmp)が無い場合と、プロジェクトに関連づけされたファイルが、移動・削除されているか、間違って指定している可能性があります。Windowsエクスプローラなどでファイルの有無と場所を確認して下さい。Templateフォルダに画像ファイルが無い場合は、PowerTestSiteを再インストールして下さい。
前回終了時に、ProjectMgrを最小化したまま終了した場合に起こるときがあります。タスクバー上で右クリックして「最大化」を選択して下さい。
プロジェクトに関連づけされたpsfファイルの内容が、システム環境と異なることが原因です。プロジェクトを新しく作り直し、正しいpsfファイルを選択するか、ProjectPropertyで正しいパスに変更または、指定されたパスにファイルを移動させて下さい。
プログラムを保存していないか、保存したファイルと違うプログラムを開いている可能性があります。プログラムを保存してから、Executeを動かして下さい。また、プロジェクトと開いたファイルの内容を確認して下さい。
プロジェクトに関連づけされたファイルが、移動・削除されている可能性があります。Windowsエクスプローラなどでファイルの有無とパスを確認して下さい。
“プロジェクトに関連づけされたファイルが、移動・削除されている可能性があります。また、psfファイルの設定ミスも考えられます。Windowsエクスプローラなどでファイルの有無を確認し、ProjectPropaty で正しいパス(場所)に変更するか、指定された場所にファイルを移動させて下さい。
また、設定ミスの場合は書式ミスを訂正するか、 c:\PowerTestSite\Bin\TEMPLATEフォルダにSystemTemplateFDからsystem.psfをコピーして下さい。
[Tool]-[SetTargetSpecification]の設定を行っていないか、設定が間違っていることが原因です。
テストする対象の電源の定格を確認して、[Tool]-[SetTargetSpecification]を再設定して下さい。
Editorの設定が正しく行われていない場合に発生します。テストする対象の電源の定格を確認して、[Tool]-[SetTargetSpecification]を再設定して下さい。
1000step以上の長いプログラムについては、画面の表示が乱れますが、Editorの動作保証範囲として500step までとしております。申し訳ありませんが、ご了承下さい。
- PW600に電源が入っていないか、足りない機器がある事が原因です。全ての機器に電源が投入されているか確認し、機器の構成を確認して下さい。
- USBにキーボード・マウスを除く、IFX-500以外の機器が接続されているか、USBケーブルが長すぎる可能性があります。上記機器以外を取り外し、また、USBケーブルはHUBを使用した状態でも、動作保証範囲は2段10mまでです。
- I/Fケーブルが外れている外れかかっている可能性があります。ケーブルを一度外して再度挿し直し、再起動してみて下さい。
- テストプログラムが作成されていない可能性があります。ProgramEditor起動して、プログラムの内容を確認して下さい。
- 負荷部に過電圧(model-500E/FでDC70V以上)が加えられた場合に発生します。接続した電源の出力電圧を確認して下さい。
- ヒートシンクがオーバーヒートした場合に発生します。システムの前後パネルに十分な空間(30cm以上)を作り、model-500E/Fの内蔵ファンが回っているか確認して下さい。ファンが回っていなければ故障ですので、弊社までご連絡下さい。
- LOAD端子に負荷線を逆接続した場合に発生します。接続した電源の出力電圧を確認して、電位の低い信号を(-)端子へ再配線して下さい。
- 負荷部に過電圧(model-500E/FでDC70V以上)が加えられた場合に発生します。接続した電源の出力電圧を確認して下さい。
- ヒートシンクがオーバーヒートした場合に発生します。システムの前後パネルに十分な空間(30cm以上)を作り、model-500E/Fの内蔵ファンが回っているか確認して下さい。ファンが回っていなければ故障ですので、弊社までご連絡下さい。
- LOAD端子に負荷線を逆接続した場合に発生します。接続した電源の出力電圧を確認して、電位の低い信号を(-)端子へ再配線して下さい。
- model-519リアパネルの設定が間違っている可能性があります。
DCPS CONTROL → REMOTE
FET CONTROL → ON
に変更して下さい。 - psfファイルの設定に問題がある場合、発生します。ProjectPropatyで正しいファイルのパスに変更するか、指定されたパスに正しいファイルを移動させて下さい。それでも解決しない場合は、恐れ入りますが弊社サポートまで問題点と状況を明記の上、当該psfファイルを電子メールにてお送り下さい。PWサポートはこちらです。
- DC電源の設定が間違っている可能性があります。電源のディップスイッチやリアパネルの接続と、実際に出力されているかテスター等で確認して下さい。
- DCPS CONTROL線が外れている可能性があります。model-519まわりのケーブルを接続し直して下さい。中途半端に接続されていると誤作動を起こす原因になります。
- psfファイルの設定が違う場合に発生します。
- センス線が未接続の可能性があります。また、センス線の+S・-Sを確認して下さい。
※DC電源から電圧は出力されるが、出力電圧の測定をしていない Monitor端子未接続またはMonitor線の断線時に発生します。測定をMonitor端子から行っているので、配線・端子周りの確認をして下さい。
エディタの設定が正しく行われていない場合に発生します。
テストする対象の電源の定格を確認して、[Tool]-[SetTargetSpecification]を再設定して下さい。
- psfファイルの設定が誤っている場合に発生します。
- センス線が未接続の可能性があります。センス線の+S・-Sを確認して下さい。
クレストファクタが3以上の場合に、不正な値になります。弊社のACソースの動作保証範囲が3以下ですので、オシロスコープでクレストファクタをご確認下さい。
サウンドカードが無いか、設定が誤っている可能性があります。設定とサウンドカードの有無を確認して下さい。
音の設定が、どの検査結果でも同じになっている可能性があります。PowerTestSiteマニュアルをご参照の上、設定を確認して下さい。
負荷線と治具、またはmodel-500との接続が緩んでいる恐れがあります。当該箇所を確認の上、ネジを締め直して下さい。
電子負荷部の故障の可能性があります。すぐに使用を中止して、弊社までご連絡下さい。
- 治具の配線不良、またはリレー接点の不良、測定ケーブルの断線などが考えられます。テスター等で治具やケーブルに、問題がないか確認して下さい。
- ユニットの接続ケーブルが外れかかっている可能性がありますケーブルを再度付け直してください。
- 治具の配線不良、またはリレー接点の不良、測定ケーブルの断線などが考えられます。テスター等で治具やケーブルに、問題がないか確認して下さい。
- ユニットの接続ケーブルが外れかかっている可能性がありますケーブルを再度付け直してください。
負荷線を撚っていないか、長すぎる可能性があります。負荷線を撚り、長さを1m以内にして下さい。また、ノイズカットコアを負荷線に取り付けるのも有効です。
出力電圧がスレショルド電圧以下の可能性があります。試験開始時の出力している電圧を確認してください。
判定条件設定が正しく行われていない可能性があります。End Conditionの設定を確認してください。
Wait timeの設定時間が短いか、電源の出力がth(しきい値)電圧まで出力が垂下する間に、負荷を再設定している可能性があります。th電圧を高くするか、Wait timeを大きく取って下さい。
EditorでStepをマイナスにしていない可能性があります。再度、ProgramEditorでStepをマイナスに再設定して下さい。
shutdown at Endを設定したにもかかわらず、入力電圧設定を行っていない恐れがあります。もう一度、Input Voltageで電圧を設定し直して下さい。
- Wait timeが短いか、電源の出力がth電圧まで出力が垂下する間に、負荷を再設定している可能性があります。th電圧を高くするか、Wait timeを大きく取って下さい。
- OVPが吸い込み方式で動作する電源の場合、model-500E/F内蔵OV電源の負荷を多く取るためにOCPが働いている可能性があります。 0.5A以上の負荷が掛かるとOV電源のOCPが働くので、これを確認し、OVPの設定でjudge ValueをSetに変更して下さい。
逆接によって、内部回路が破損している恐れがあります。逆接続をした後に、OV電源の出力が無くなった場合は、弊社にご相談下さい。
出力電圧がシーケンス測定前からスレショルド電圧以下の可能性があります。試験開始前の出力電圧を確認して下さい。
存在しないシーケンスボード(SC-860/SC-860A)で測定しようとしている可能性があります。シーケンスボードの有無を確認して下さい。
GPIBアドレスの設定が誤っている可能性があります。プログラムとGPIB機器のアドレスを確認して下さい。
ケーブルの接続に問題があるか、wait timeが短い恐れがあります。接続を確認の上、wait timeを長めにとって下さい。
※前提として、プログラムの編集はマスター管理PCのみで行うこととします。
- ファイル実態はNASに保存して共有する方法
- ファイル実態はマスター管理PC上で保存し、リムーバブルメディアを媒体としてコピーして使用する方法
各ファイルの同時アクセスが可能かの一覧です。
注意しなくてはいけない点があります。
- ネットワーク越しの場合、通信インフラに問題が発生した場合にデータの保証ができません
検査データ等の重要なデータはクライアントPC上で管理したほうがデータの安全性が高まります。 - MDBファイルは複数の環境から同時アクセスできません
検査データを格納しているMDBファイルは複数のプログラムから同時アクセスができません。
例えば、同じ検査プログラムを同時にいくつかの検査機(クライアントPC)で使用する場合、同じデータベースファイルを共有していると一つのクライアントPCがアクセス時にロックをかけてしまうため他のクライアントPCがアクセスできません。そのような場合は回避策として各クライアントPCでデータベースファイルを持つことで回避できます。
- USBメモリーを媒体とした場合、MDBのファイルサイズが大きくなることに注意が必要です
MDBファイルは検査するごとにファイル容量が大きくなっていきます。USBメモリーの様に容量が比較的小さい媒体に保存することは推奨しません。 - ポータブルメディアの場合ドライブレターを固定する必要があります
ポータブルメディアは接続したポート等でドライブレターが変わってしまう恐れがあります。
ドライブレターを固定する設定を行っていただく必要があります。 - 検査プログラムファイル(PSP)や検査プロジェクト設定ファイル(ini)はアクセスの排他制御が行われません
パスワードロック等で編集のロックをかけるなどして排他制御を行う必要があります。
詳しくは弊社サポート(PW-support@hq.keisoku.co.jp)までお問い合わせ下さい。
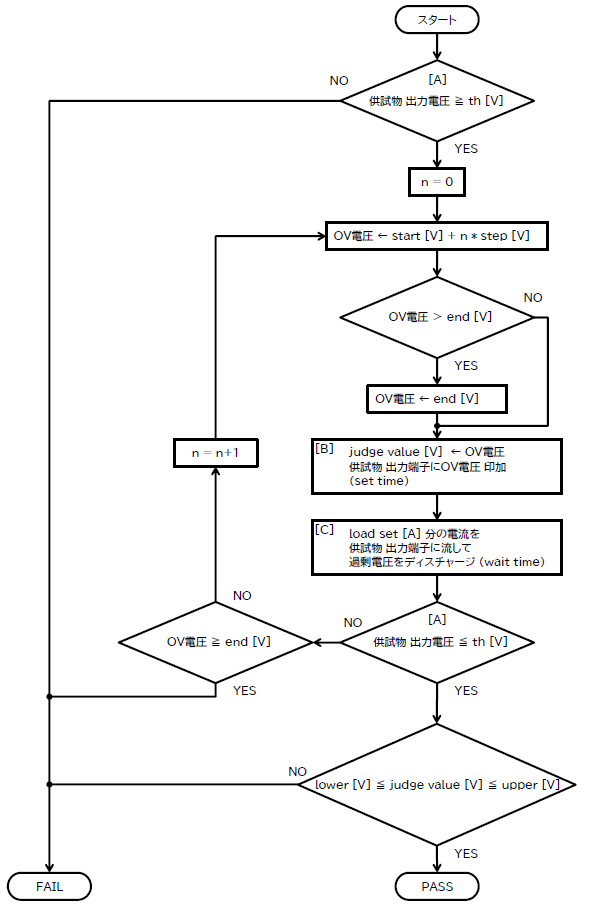
OVP TEST時、
- thを横切っていないかを確認する
- 出力を設定し、待機する(set time)
- 出力を停止して所定時間待機する(待ち時間が設定されている場合は)(wait time)
- 1から繰り返し
の順でソフトウェアが判定を行います。
OVP時に電源がショート状態になるようなタイプのものであれば、OVの電流リミッターが働き電源の出力端電圧が下がりますので連続可変でもOVP検出ができます。
逆に、電源の出力端がショートにならないタイプのものはOV電源により電圧が印加されたままになり、保護が働いているかを確認することができません。そういったタイプのものは休み時間を入れる方法でOVの動作が判別できます。ただし、自動復帰しないものに限ります。
不要なAccessのバージョンを削除することで回避できます。
この現象は複数のAccessをインストールしている場合に古いAccessでTestReportを開くと発生します。
Accessのバージョンを削除する方法につきましては、Microsoftのサイトからご確認ください。
PTSExecute.iniの[EXEC_CFG]に以下の設定値を追加することで、フォントサイズの変更が可能です。
DLG_FONT_SIZE=12
大きくし過ぎると文字がはみ出ますのでご注意ください。
変更可能です。
検査プログラム作成時に表示されている各負荷CHの名前を変更したい場合は、該当のシステム定義ファイルの下記の赤字部分を変更したい名前に変更して下さい。
エラーメッセージは、検査プログラムを2回実行された時の警告です。
対処方法としては、起動した二つのexecuteを全部閉じて検査プログラムを再実行して下さい
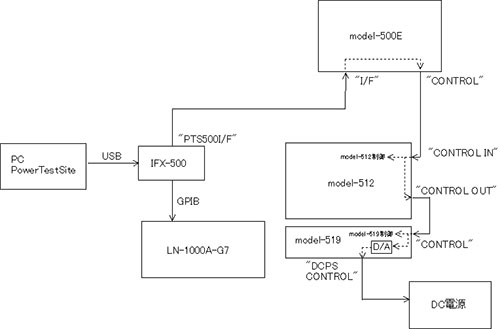
PowerTestSiteはPCのUSBからIFX-500へ指令を送ります。この指令はGPIBを通してLN-1000A-G7を制御します。
一方、model-519の制御についてはIFX-500から”PTS500I/F”コネクターを通してmodel-500Eへ送られます。この制御信号はmodel-500Eを通過しCONTケーブルより交流電源model-512へ送られ、さらにmodel-512を通過しmodel-519へ送られ制御されます。そしてmodel-519がDC電源の制御を行います。
図のようにメディアのドライブレターに注意してください。
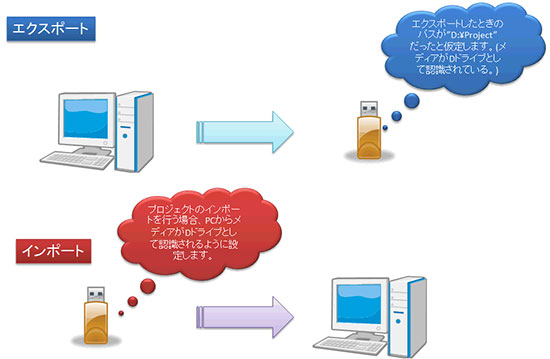
ProjectManagerは全体パスにて各種ファイルを管理しています。
したがって、フルパスがあっていないと各種ファイルが読み込めません。
EMGはEmergencyの意味で、非常停止により試験を終了したという意味になります。
手元のBOXSC-816Aの非常停止ボタン、またはmodel-600Eの何らかのアラームにより停止した場合判定結果はEMGとなります。
以下、Windows XPをベースに説明します。
- コントロールパネルからプログラムの追加と削除を選びます。
- PowerTestSite/PowerTestSitePRO/PowerTestSiteMINIのいずれかをクリックし、
“サポート情報を参照するには、ここをクリックしてください。”をクリックします。
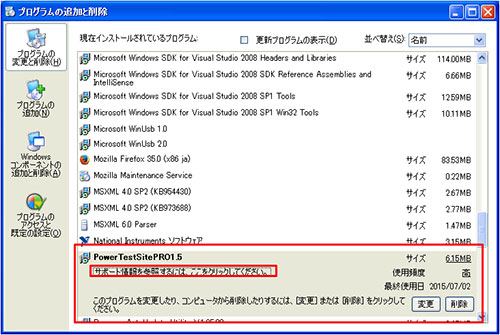
- サポート情報のダイアログにインストールされているソフトウェア名とパッケージ番号が表示されます。
ソフトウェアの問い合わせの際にはこの情報と併せてお問い合わせください。
使用可能です。
使用するには最新版のVirtual COM Portドライバーと本体側にCOMポートとして認識させる設定が必要になります。
詳しくはバーコードリーダー本体の取扱説明書を参照してください。
- 対応しているOS
Windows 7 32Bitまで(2015/04/02時点、64Bitには今後対応予定です) - バージョンアップが必要なハードウェア
model-602
IFX-500
(詳細はこちらよりお問い合わせ下さい) - 検査プログラムで修正が必要な個所
シーケンス測定(IFX-500のシステムのみ)
→ステップを再挿入していただく必要があります。試験ステップの動作速度はPCの速度によって変わる可能性がありますので待ち時間ステップ等で調整していただくかExecuteのステップインターバル設定を変更していただく必要があります。※校正とセットにすると割引になりますので、トラブル防止を兼ねて校正とセットにすることをお勧めします。
「INPUT MEASUREMENT」の「Efficiency」で効率を測定した際に誤差が大きくなる要因としましては、 出力側に登録されている電力測定器すべての電力を測定して計算する仕様となっており、この測定誤差に起因している場合があります。
PowerTestSiteではメモリー機能という変数格納機能があり、各種測定の結果をメモリーへ格納することができます。 また、メモリーへ格納した結果はCALCULATIONステップで計算させる際に使用することができます。
これらの機能を使用して計測を行う方法を説明します。
- INPUT MEASUREMENTステップで電力を測定し、メモリーに格納します。
- 出力側の電力測定を行いメモリーに格納します。
- メモリーに格納した結果から計算を行います。
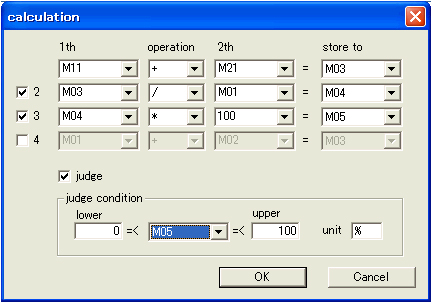
以下の例では、
M11->負荷CH1の電力測定結果
M21->負荷CH2の電力測定結果
M01->入力電力測定結果を想定しており、
1行目->負荷CH1の電力測定結果 + 負荷CH2の電力測定結果をM03へ
2行目->M03(負荷チャンネルの電力総和) / M01(入力電力)をM04へ
3行目->M04 * 100をM05へと行うことでM05へ最終的に効率計算結果が格納されます。
model-6XX (5)
model-512はローレンジ10A、ハイレンジ5Aです。一方、model-602はローレンジ20A、ハイレンジ10Aです。
又、model-512はインバーター方式の為DUTの急峻な突入電流では電圧が降下します。model-602はインバーター方式+小型リニアアンプ方式 の為急峻な突入電流でも電圧波形は変化しません。これらの事から突入電流が大きくなったものと思われます。
model-602Aには二つのレンジ(HIGH: AC300V, LOW: AC150V)があります。
供試電源の突入電流が10Aを越えているときにAC300Vでテストを行うと”OVER PEAK CURR”が発生することがあります。この場合はAC150Vレンジでテストを行うようにしてください。
まず、供試物入力電流の波形を確認してください。
入力電流の波高率(クレストファクタ)が高い場合、測定値が低く出ることがあります。
model-602の交流電流測定機能に関する仕様は以下の通りです。
交流電流 レンジ 0.2A 2A 20A
確度 *2,6 ±0.2% of rdg + ±0.5% of F.S ±0.2% of rdg + ±0.2% of F.S ±0.2% of rdg + ±0.2% of F.S
確度 *2,6 ±0.5% of rdg + ±0.5% of F.S ±0.5% of rdg + ±0.2% of F.S ±0.5% of rdg + ±0.2% of F.S
分解能 0.1mA 1mA 10mA
*2 出力周波数 50/60Hzのとき
*6 抵抗負荷時(クレストファクタ 1.41)
*7 クレストファクタ 3以下の全波整流波形のとき
日置電機製3333の場合クレストファクタが300までの測定が可能となっており、クレストファクタが高い電流波形を測定した場合、差が大きくなります。
INPUT、LOAD、DVM、DI/DO、OV、REMOTEの互いのグランドはアイソレーションされています。
フレームともアイソレーションされています。
対処方法は以下の二通りが考えられます。
- model-602のN-FG間をショートする。
- model-602と供試物の間にラインフィルターを入れる。
両者の対策を施すとmodel-602側の測定値と実際供試物に印加されている値が不一致になりますので供試物の直近にパワーメータを入れていただく必要があります。
model-5XX (3)
- 電流測定用シャントがもともと使っていたものと異なる定格のmodel-519に変更した
- 組み合わせる電源の定格電圧がもともと使っていたものと異なる定格のものに変更した
上記の場合、PSFファイルの変更が必要となります。
出力定格電圧が異なる電源に変更した場合、以下の数値を変更した電源の電圧に変更します。

model-519のシャントが異なる場合は、以下の数値を変更します。
シャントの定格は、電圧に関してはフルスケール時に200mVを発生するものと使用しています。
なので、20Aシャントの場合は
R=200mV / 20A = 0.01
で、係数に0.01を設定します。
model-512はローレンジ10A、ハイレンジ5Aです。一方、model-602はローレンジ20A、ハイレンジ10Aです。
又、model-512はインバーター方式の為DUTの急峻な突入電流では電圧が降下します。model-602はインバーター方式+小型リニアアンプ方式 の為急峻な突入電流でも電圧波形は変化しません。これらの事から突入電流が大きくなったものと思われます。
冷却用ファン部分にほこりが詰まっている可能性がありますので清掃をお試しください。
それでも復旧しない場合、弊社サポート(PW-support@hq.keisoku.co.jp)までお問い合わせください。
その他 (2)
正しく挿し込まれていないか、ディップスイッチの設定が間違っている可能性があります。ボードを一度抜いてディップスイッチを確認の上、スロットに挿し込んで下さい。
メーカー:株式会社トーコネ
型名:BNCP-1.5A-K又はBNCP-58A-Kです。
ワットチェッカー (33)
1時間(60分)の1/6の値を表しております。
現在(例えば10分)の電力を1時間当たりの電力量に換算して表示しております。
実際に10分間計測して0.05kW/hとなったようですが?
10分間計測して0.05kWhとのことから予測しますと、お客様がお取りになっている電力は、電力=0.05kWh×6(10分が60分の1/6なので、6倍します)=0.3KWと考えられます。
ワットチェッカーは下図の様な構造になっております。
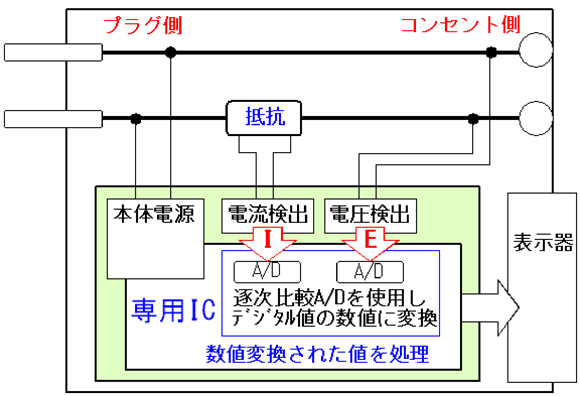
動作原理
- ワットチェッカーのプラグをコンセントに挿すと、ワットチェッカー本体に電源が入り動作を開始します。
- ワットチェッカーのコンセント側に測定対象のプラグを差し込みます。
電圧測定はコンセント側の両端、電流測定は抵抗の両端の電圧をそれぞれ検出します。
検出した電圧値は専用ICのA/D変換器を介して逐次、数値に変換しデータ処理を行います。
(補足:A/D変換器は測定周期に対して2000個のサンプル数のデータ変換を行います。) - 処理した結果を1秒毎に処理結果を測定値として表示します。
演算式
演算処理は右の計算式で求められます。
周波数[Hz]は電圧(E)検出後、内部時計を元に測定を行っています。
積算時間は内部時計の結果を表示しています。

測定項目は以下の8種類になります。
- 電圧測定
交流電圧の実効電圧を測定結果として表示します。ワットチェッカーでの単位表示は、[Volt]表示となります。 - 電流測定
交流電流の実効電流を測定結果として表示します。ワットチェッカーでの単位表示は、[Amp]表示となります。 - 電力測定
負荷で実際に消費された電力の測定結果を表示します。各瞬間の電圧と電流の積を1周期で平均した時の電力が測定結果となります。ワットチェッカーでの単位表示は、[Watt]表示となります。 - 皮相電力測定
意味は名のごとく表向き(見かけ)の電力結果となり、実際の電力とは異なります。皮相電力測定値は、[電圧測定]と[電流測定]の積の計算値となります。ワットチェッカーでの単位表示は、[VA]表示となります。 - 力率
簡単には交流電力の効率を示します。力率は[皮相電力]÷[有効電力]の商の計算結果となり、パーセント表示されます。ワットチェッカーでの単位表示は、[PF]表示となります。 - 周波数
交流の周波数の測定結果を表示します。東日本は 50[Hz], 西日本は 60[Hz]となります。ワットチェッカーでの単位表示は、[Hz]表示となります。 - 積算電力
電力の総和が積算電力となります。ワットチェッカーでの単位表示は、[KWH]表示となります。[KWH]は、1時間[H]当たり何[KW]の電力を消費したかを意味しています。(補足:電力1[KW]は1000[W]に相当します。)9999[KWH]を超えると表示が9999から変化しないため、リセットを行う必要があります。 - 積算時間
測定開始時刻から、ワットチェッカーが測定している積算時間となります。
| 表示 | 表示の意味 |
|---|---|
| 00:00 – 99:59 | [時間] : [分] |
| 0100 – 9999 | 時間 |
9999[KWH]を超えると表示が9999から変化しないため、リセットを行う必要があります。
誘導リアクタンスのコイルに流れる電流 I Lと容量リアクタンスのコンデンサに流れる電流 I Cは、 一定周期毎に充放電を繰り返して電力を消費しないエネルギーとなります。
無効電力は電圧の位相と 90°ずれた電流 I L または電流 I Cを掛けた電力のことを言います。
※ワットチェッカーでは無効電力を直接測定する機能はありません。
皮相電力[VA]と有効電力[W]を元に演算をして求める事は可能です。
電気エネルギーの消費に伴う電流を有効電流[IR]のこと。
電圧と同相の電流を掛けた物を有効電力といいます。
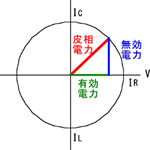
定格の3倍までは、正しく測定を行うことが出来ます。
定格の5倍までは、故障せずに使用することが出来ます。
状況に依存しますが、定格を超えて瞬時に故障するわけではありません。
ワットチェッカーの定格は15[A]となっており、クリストファクタ(CF)は3です。
測定可能なピーク電流値は、45[A]までとなっています。
(例:定格の120%の場合:1時間程度持つことも考えられますが、数分で故障することも考えられます。)
厳密な時間についてはお応え致しかねますが、定格を越えた場合表示が点滅し、アラームが鳴ります。
出来るだけ短時間にて、取り外して頂けます様お願い致します。
ワットチェッカーにはデータを出力する機能はなく、外部接続インターフェースも搭載されておりません。
(補足)
大崎電気工業株式会社 には、データをPCに出力できるワットチェッカー(MWC-01(端子タイプ))という製品がございます。
ございません。
ワットチェッカーにはデータロガーの機能はなく、現在状態での測定値と積算時間と積算電力のみとなっています。
弊社は、100V仕様の2Pコンセントタイプのワットチェッカーのみを販売しています。
ワットチェッカーの入力電源範囲は 90V〜125Vの範囲となっています。
(補足)
大崎電気工業 株式会社 には、200[V]を測定できるワットチェッカー(MWC-01(端子タイプ))という製品があります。
ワットチェッカーは回路の構成上、外形が現在の形状になっております。
また、小型の商品は取り扱っておりません。
コンセントに出力する部分の保護回路はありません。
ワットチェッカー本体を保護するヒューズはあります。
屋外での使用はできません。ワットチェッカーは室内用となっています。
また埃の多い場所等での使用に関しては、定期的に確認して埃が溜まらない環境で御使用下さい。
精度保証は、Maxの値をご参照ください。
測定誤差の目安として代表値(Typ.:Typical)を記載しています。
2000MS1を御使用の場合、2000MS1をコンセントから外す等、電源を切る事で初期化を行います。
2000MS1の電源が切れている等の状況がないか確認を行って下さい。
また、電源が切れても積算時間が残る商品として 2022-04 ワットチェッカーPlusがあります。
いいえ。ワットチェッカーはどの表示モードでも積算電力と積算時間の測定は行っています。
[KWH]のスイッチが選択されている状態で再度[KWH]スイッチを押すと、[METER]表示が[CLOCK]に切り替わり積算モードに変わります。測定モードを[METER]に戻すには再度[KWH]スイッチを押して下さい。
[KWH]キーを押すと[METER]の表示で積算電力を表示します。 積算電力表示の状態で[KWH]を押すと[CLOCK]の表示で積算時間を表示します。
この状態で[KWH]キーを押すと積算電力表示に戻ります。 また、他のキーを押すと押されたキーの表示に戻ります。
クレストファクタ(CF)は波高率のことです。 波高率は最大値の実効値に対する比をいい、波高率 = 最大値/実効値 の値で示されます。
ちなみにワットチェッカーのクレストファクタ(CF)は3となっています。
(※クレストファクタ(CF)は、正弦波 = √2 , 三角波 = √3 , 方形波 = 1 となります。 )
コンセント等の商用交流電源の場合は正弦波となります。
(例:交流電源が正弦波、負荷抵抗100[Ω]でのクレストファクタの計算方法)
抵抗負荷の場合は、AC100Vで負荷抵抗が100[Ω]の場合には電流測定値は 1[A]の実効値になります。
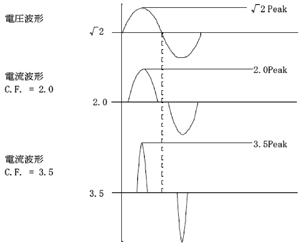
商用交流電源は正弦波となり電圧の波高値は√2 = 141.4[V]となり、電流の最大値も1.414[A]となります。
従って、抵抗 100Ωではクレストファクタ(CF) は 1.414 となります。
ワットチェッカーは定格15Aとなっていますので、ピーク電流が45Aまでの電流値は測定できます。
また45A以下でもクレストファクタ(CF)が3以上の場合は測定可能ですが、測定誤差が大きくなります。
(※ワットチェッカーはクレストファクタ(CF)が3となっています)
各々の電力の違いは下記をご参照下さい。
| 電力 | 計算方法 |
|---|---|
| 有効電力[W] | 電圧と電流を短時間(1サイクル2000ポイント)で測定して演算した電力値のこと。 |
| 皮相電力[VA] | 電圧と電流をそれぞれ測定した結果を演算した電力値のこと。 |
(補足)
白熱電球の様な抵抗のみで構成された商品では電圧と電流の波形が一致します。
この場合、有効電力[W]と皮相電力[VA]は同じ値を示し力率は1.00となります。
一般的には、有効電力の方が小さい値を示し力率は 1.00未満の値になります。
通電中の有無で時間の管理を行っていません。
ワットチェッカーが動作している時間を計測しています。
初期化方法は下記をご参照下さい。
| 商品名 | 初期化方法 |
|---|---|
| 2000MS1(ワットチェッカー) | コンセントから外して下さい。 |
| 2202-04(ワットチェッカーPlus) | 初期化ボタンを3秒以上押して下さい。 |
ワットチェッカーの測定時間は、以下のように表示されます。
| 表示 | 表示の意味 |
|---|---|
| 00:00 – 99:59 | [時間] : [分] |
| 0100 – 9999 | 時間 |
9999のまま表示が固定されます。リセットを行って下さい。
待機電力測定は難しいと思います。
待機電流が小さい値(0.02[A]等)の場合には、電流測定誤差が大きく正しく測定できない場合があります。
| 測定 | 測定精度 | 最大測定誤差 |
|---|---|---|
| 電力 | 1875[W]の最大2% | 37.5[W] |
| 1875[W]の0.5%(代表値) | 9.4[W] | |
| 電流 | 15[A]の1% | 0.15[A] |
故障の原因となります。短時間でも定格以内で使用して下さい。
「02」の表示は2[W]を意味します。
ワットチェッカーの電力表示は、ファームウェアの設計の都合上2桁表示になっています。
内部の校正テーブルが書き変わっている可能性があります。詳しくはお問い合わせ下さい。
MWC-01のIFユニットは弊社製品ではございませんので、直接大崎電気様へお問い合わせください。
過電流、過電力を検出した場合、電流(電圧)が定格内に下がるまで1秒間隔で警告音が鳴り、表示が点滅します。
過去、弊社に電子レンジによる高周雑音がワットチェッカーに影響を与えたという報告はございません。
実際に電子レンジで使われているお客様もございます。
大変申し訳ありませんが、本製品の精度はフルスケールでしか設定されておりません。
20%でも50%でも同様にフルスケールの精度での誤差が発生する可能性があります。
また、20%、50%の実力値のデータ(情報)も弊社で持っておりません。
大変申し訳ございませんが、ワットチェッカーは現在販売および取り扱いを終了しており、校正も実施しておりません。
無停電電源装置(UPS) (2)
推奨交換期間を過ぎて使用し続けると、バッテリーの液漏れなどのリスクがあるため、必ず交換推奨期間内に交換してください。また、未使用状態でバッテリーの充放電を行わない場合、交換推奨期間前でもバックアップ時間が短くなることがあります。そのため、常に使用し続ける環境でご使用ください。
接続する機器の最大消費電力(VA)の合計に対して、UPSの出力容量に余裕があるほど、停電時のバックアップ時間は長くなります。最大消費電力(VA)以上の出力容量を選ぶのは基本ですが、余裕をもたせたほうが、より効果的なバックアップ電源としてお使いいただけます。以下UTシリーズおよびURシリーズの消費電力(VA)に対する負荷率/平均バックアップ時間推移表となります。
URシリーズ負荷率/平均バックアップ時間推移表
| 型名 | UR-S1-1.5K-S1 UR-S2-1.5K-S2 | UR-S2-2K-S2 | UR-S1-3K-S1 UR-S2-3K-S2 |
||||||
|---|---|---|---|---|---|---|---|---|---|
| バッテリモジュール | normal | +1BM* | +2BM* | normal | +1BM* | +2BM* | normal | +1BM* | +2BM* |
| 100VA(70W) | 100min | 300min | 540min | 190min | 420min | 600min | 190min | 420min | 570min |
| 200VA(140W) | 60min | 190min | 360min | 100min | 240min | 360min | 100min | 240min | 360min |
| 300VA(210W) | 40min | 140min | 240min | 70min | 160min | 240min | 70min | 160min | 240min |
| 500VA(350W) | 25min | 80min | 160min | 50min | 100min | 170min | 50min | 100min | 170min |
| 1kVA(700W) | 12min | 40min | 75min | 25min | 50min | 80min | 25min | 50min | 80min |
| 1.5kVA(1050W) | 6min | 20min | 35min | 15min | 40min | 60min | 15min | 40min | 60min |
| 2kVA(1400W) | ー | ー | ー | 8min | 20min | 40min | 8min | 20min | 40min |
| 2.5kVA(1750W) | ー | ー | ー | ー | ー | ー | 7min | 15min | 25min |
| 3kVA(2100W) | ー | ー | ー | ー | ー | ー | 6min | 12min | 20min |
※別売りのバッテリモジュール(型式UR-02)を追加するだけで、簡単にバックアップ時間の延長可能です。
*:+1BMはUR-02を1台増設。+2BMはUR-02を2台増設を意味します。
UTシリーズ負荷率/平均バックアップ時間推移表
| 容量 | UT-S1-1.5K-S1 UT-S2-1.5K-S2 | UT-S1-2K-S1 | UT-S1-3K-S1 UT-S2-3K-S2 |
|---|---|---|---|
| 100VA(70W) | 90min | 130min | 160min |
| 200VA(140W) | 60min | 70min | 100min |
| 300VA(210W) | 40min | 50min | 60min |
| 500VA(350W) | 25min | 30min | 40min |
| 1kVA(700W) | 12min | 18min | 25min |
| 1.5kVA(1050W) | 6min | 10min | 18min |
| 2kVA(1400W) | – | 6min | 12min |
| 2.5kVA(1750W) | – | – | 9min |
| 3kVA(2100W) | – | – | 6min |
こちらでお探しの情報が見つからない場合は、お問い合わせフォームをご利用ください。